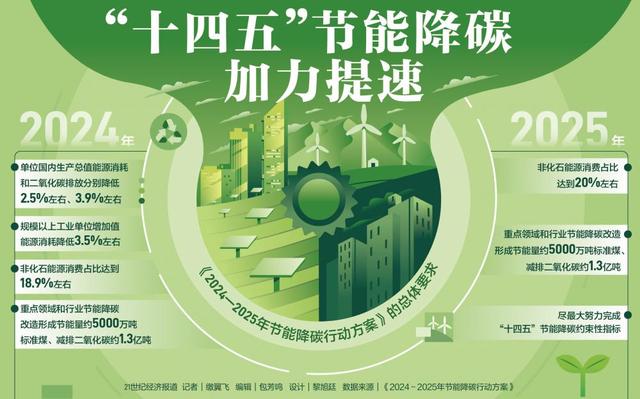
国务院关于印发《2024—2025年节能降碳行动方案》的通知
首页 >
交交变频器用于交流提升机控制系统的研究
来源:
时间:2016-06-15 22:52:08
热度:
交交变频器用于交流提升机控制系统的研究 1引言 矿井提升机所使用的交流绕线式电动机通常是靠切换其转子电阻来进行调速的。但电动机依靠转子电阻获得的低速,其运行特性较软。当提升容器通
1引言
矿井提升机所使用的交流绕线式电动机通常是靠切换其转子电阻来进行调速的。但电动机依靠转子电阻获得的低速,其运行特性较软。当提升容器通过给定的减速点时,由于负载的不同,而将得到不同的减速度,不能达到稳定的低速爬行,最后导致停车位置不准,不能正常装卸载。通过操作人员同时施用机械闸,利用闸制动和电机拖动的合成特性来得到要求的减速度及低速爬行。这样做,不仅耗电量大,闸瓦磨损大,而且操作人员工作非常紧张,安全性、可靠性差。
晶闸管串级调速自动化提升机,可以获得较好的控制特性。但电控设备多、容量大。为获得减速阶段的制动力矩,还需一套动力制动装置,因而使系统复杂,投资增加。特别是对于500kW以上的绕线电动机,其转子电压约为700V左右,使晶闸管装置的选择带来困难。
当交流提升机只采用动力制动时,减速爬行阶段就要出现制动-电动、电动-制动的多次转换,才能获得平均的、而非平稳的爬行速度,能满足爬行距离较长的提升机。这种方法要求主减速器有两个主轴,并增加气囊离合器,增加了机械结构和制造过程的复杂性。动力制动的最大弱点是不能提供正力矩。当系统需要低速正力爬行时,要从动力制动转换到高压状态工作,实行爬行阶段二次给电的脉冲爬行。这种方法机械特性较软,不易控制。
采用低频制动,即将电动机定子绕组从三相电网(6kV,50Hz)上断开后,接至电压相序相同的低频电源上。提升机低频拖动在减速阶段使电动机运行在再生发电制动区内,在爬行阶段运行电动区内。并且,提升电动机由制动状态到电动状态是自然过渡的。交交变频器作为一种在大功率、低速范围内得到很好应用的交流调速方案,其频率范围容易调节,作为低频电源适用于各种作业的交流提升机。而数字化是现代传动技术的发展趋势,实现全数字控制是交流提升机自动化的新课题。
2交-交变频器
交交变频调速系统是一种不经过中间直流环节,直接将较高固定频率的电压变换为频率较低而可变输出电压的变频调速系统。其每一相均由两组(正、负组)三相全波变流器反并联构成。输出的整流电压为:
Ud=Ud0cosαp=-Ud0cosαN(1)
式中:αP——正组整流器控制角;
αN——负组整流器控制角;
Ud0——α=0°输出电压平均值。
交交变频器输出电压的基波为正弦波,即:
Ud=Udmsinω1t(2)
则
cosαP=(Udm/Ud0)sinω1t=ksinω1t(3)
式中:k——输出电压比,k=Udm/Ud0;
ω——输出电压基波的角频率。
通过改变正、负两组整流器触发角的频率,即可改变输出电压的频率;改变输出电压比k值,即可改变输出电压值。
交交变频器通过两组反并联的晶闸管交替工作来产生一相低频的交流电压供给负载,存在环流问题。在可逆直流传动中采用的工作方式(如逻辑无环流、错位无环流、可控环流)一般在交交变频器中均可适用。交交变频器的主电路及基本控制部分可采用直流传动的相同组件和技术。
首页 下一页 上一页 尾页

-
北京市节能减排财政政策综合示范实施方案获批2024-08-16
-
我国纺织行业节能减排形势严峻2024-08-16
-
南非铸造产业向节能减排方向发展2024-08-16
-
高压变频器将成为市场节能减排主力浅析2024-08-16
-
国家审计署:44个节能减排项目未达标2024-08-16
-
节能减排急需调整贸易结构2024-08-16
-
山东《2014-2015年节能减排低碳发展行动实施方案》(全文)2024-08-16
-
湖北省以节能减排倒逼产业转型2024-08-16
-
《节能减排低碳发展行动方案》频出台 各省目标不同2024-08-16
-
六大重点工程助力安徽合肥节能减排2024-08-16
-
京津冀融资300亿元用于节能减排2024-08-16
-
我国直流高电压计量最高标准通过建标考核2024-08-16
-
林伯强:节能减排或成能源互联网领域最快实现内容2024-08-16
-
林伯强:节能减排或成能源互联网领域最快实现内容2024-08-16
-
财政部:节能减排补助资金专款专用 不得挪用2024-08-16