ADAYO华阳数码特“煜眼”技术,解决自动泊车痛点
ADAYO华阳数码特“煜眼”技术,解决自动泊车痛点作为未来汽车技术发展的大趋势,自动驾驶显然已成为行业中不容忽视的热点之一。不过,自动驾驶商业化的全面落地却并非易事,还存在技术、成
作为未来汽车技术发展的大趋势,自动驾驶显然已成为行业中不容忽视的热点之一。不过,自动驾驶商业化的全面落地却并非易事,还存在技术、成本、法规等方面的难点,也势必要经历一个逐步推进的过程。
不少业内人士认为,自动驾驶的商业化进程将从自动泊车(Auto Parking Assist,APA)以及自主代客泊车 (Auto Valet Parking,AVP)开始,这主要源于其在应用方面的优势。
自动泊车的3大应用优势 01 需求迫切 尽管不同国家的汽车用户在自动驾驶功能的喜好上有所差别,但比较类似的一点是,大家都不爱停车,确切的说是不爱找车位和停车,因此对于自动泊车需求相对迫切。 02 限制较小 公共的道路有相应的政策法规限制,而自动泊车的应用场景并不是在公共的道路上,因此相关限制较小。 03 难度较小 尽管就自动泊车本身而言,技术难度并不低,但较之完全自动驾驶,其所涉及的场景复杂度明显要低很多,技术难度也因此相对较低。 自动泊车的用户体验痛点 就自动泊车系统而言,主要有摄像头和超声波雷达两种传感器系统参与,这两种传感器要能够把物体角度、深度等信息体现出来,结合算法,形成准确的路径规划,最终做到快速准确地将车停到相应的位置。 然而现实情况却是在使用过程中,由于超声波雷达的方向性不好,以及现阶段光学摄像头很难做到高一致性,偏差率较大,因此易对算法的实现和效果产生不利影响。 车载摄像头供应商惠州市华阳数码特电子有限公司(以下简称ADAYO华阳数码特)相关资料显示,在自动泊车系统中,对地面上的停车线需要通过摄像头来识别定位等应用场景,以百万像素的180度全景摄像头为例,对7米远的地上目标,3个像素的误差,就有可能造成0.5米的误判,当摄像头装得越低,误差会越大(如上所示)。而由于误差的存在,自动泊车系统便很难做到“一把倒到位”,因此用户体验不佳。 难解的摄像头一致性问题 01 生产工艺难达要求 目前,摄像头的一致性更多是通过生产工艺来保证。不过需要注意的是,由于摄像头本身属于光学镜头,光学镜头中有很多变量的成像器件,其中任一参数的变化都会对成像质量产生影响,而仅靠目前的生产工艺,其实很难保证摄像头的一致性。 华阳数码特数据显示,目前行业内单纯靠摄像头器件的精度及组装工艺的精度,是非常难达到全视野内(比如180度)2-3个像素的误差要求的。 02 内参测定效率较低 如果能够精准测量出摄像头的内参(摄像头中心、焦距等参数),再用算法进行补偿,一定程度可解决这一问题。目前,不少自动驾驶公司都有自己的一套摄像头内参的标准算法。 不过,针对摄像头内参测量和标定,特别是大视野摄像头(如190度FOV)的标定,多数公司采用的还是传统的做法:拍摄多张图(9张-20张),经过一定的算法,得出摄像头的内参。然而,这样人工测定一只摄像头要花30分钟左右,对于量产化的摄像头产品,这种算法很难对每个摄像头进行单独标定。 “煜眼”技术的特殊之处!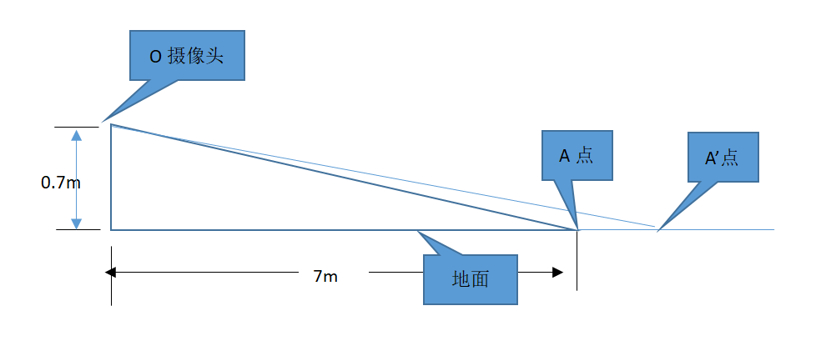
针对摄像头一致性难题,ADAYO华阳数码特重磅推出了“煜眼”技术,目前此项技术在百度阿波罗自动驾驶项目及其它的一些知名车企已经开始应用。这一技术主要有以下几大特点:
01 准确
ADAYO华阳数码特“煜眼”技术可达到在线操作的节拍速度,并将内参写入摄像头内的FLASH中,自动驾驶算法可以直接读取内参并在算法进行补偿,来精准地确定物像对应关系。
02 快速
就一般实验室而言,通过自动算法去标定摄像头内参,可能需要15-30分钟,如果人工测算速度更慢。而ADAYO华阳数码特“煜眼”技术采用独特的中心点算法及其它参数优化算法,在不到20秒时间内,就可稳定、准确的测出摄像头内参。
03 应用场景可拓展 对于自动泊车来说,ADAYO华阳数码特“煜眼”技术意义重大。而在前向ADAS领域,2个像素的误差会导致深度信息偏差超过十几米,因此保证摄像头的一致性也同样重要。由此不难推断,“煜眼”技术的应用其实并不局限于自动泊车领域,未来还可向更大范围的应用拓展。 小结 ADAYO华阳数码特“煜眼”技术摄像头,实现了在线快速内参标定及保存,解决了摄像头行业公认的无法保证摄像头一致性的难题,降低了车用摄像头的生产工艺的难度和成本,也因此提升了用户体验,为自动驾驶商业化“添砖加瓦”。当然不可否认的是,自动驾驶商业化的落地需要政策、技术等多方面齐发力,而技术方面,也需要各个细分领域企业形成合力,共同推进。
-
自动驾驶量产需产业协同,禾多科技要做“中国向导”2019-09-25
-
自动驾驶量产需要产业协同,禾多科技要做“中国向导”2019-09-25
-
专注于L4级自动驾驶技术,元戎启行获5000万美元Pre-A轮融资2019-09-24
-
实现自动驾驶需要强大算力、多重冗余、全新电子电气架构2019-09-24
-
全球首张自动驾驶商用牌照的意义是什么?2019-09-24
-
现代20亿美元投资Aptiv:全球首个车企+传统供应商的自动驾驶合资公司2019-09-24
-
全球首张自动驾驶商用牌照发出,这意味着什么?2019-09-24
-
尹颖:实现自动驾驶需要强大算力、多重冗余、全新电子电气架构2019-09-24
-
现代20亿美元投资安波福:全球首个车企+传统供应商的自动驾驶合资公司2019-09-24
-
百度等三家企业获得全球首张商用牌照 自动驾驶真的来了?2019-09-23
-
Waymo加州自动驾驶出租车试点仅一月,乘客已超6200名2019-09-23
-
多伦多大学研发便携式量子光传感器,或可提升自动驾驶汽车探测能力2019-09-23
-
全球首张自动驾驶商用牌照发放是怎么回事?全球首张自动驾驶商用牌照发放意味着什么?2019-09-23
-
5G+北斗!全国第一张自动驾驶商用牌照发出,百度抢先2019-09-23
-
首批智能网联汽车示范应用牌照颁发,自动驾驶正无线逼近2019-09-20