技术文章:基于Linux的tty架构及UART驱动详解
技术文章:基于Linux的tty架构及UART驱动详解本文由技术大拿:蒙工 投稿!桂电毕业的资深嵌入式专家。一、模块硬件学习1.1.Uart介绍通用异步收发传输器(Universa
本文由技术大拿:蒙工 投稿!
桂电毕业的资深嵌入式专家。
一、模块硬件学习
1.1.Uart介绍
通用异步收发传输器(Universal Asynchronous Receiver/Transmitter),通常称为UART,是一种异步收发传输器,是电脑硬件的一部分。它将要传输的资料在串行通信与并行通信之间加以转换。
作为把并行输入信号转成串行输出信号的芯片,UART 通常被集成于其他通讯接口的连上。
UART 是一种通用串行数据总线,用于异步通信。该总线双向通信,可以实现全双工传输和接收。在嵌入式设备中,UART 用于主机与辅助设备通信,如汽车音与外接AP 之间的通信,与PC 机通信包括与监控调试器和其它器件,如EEPOM通信。
1.1.1.通信协议
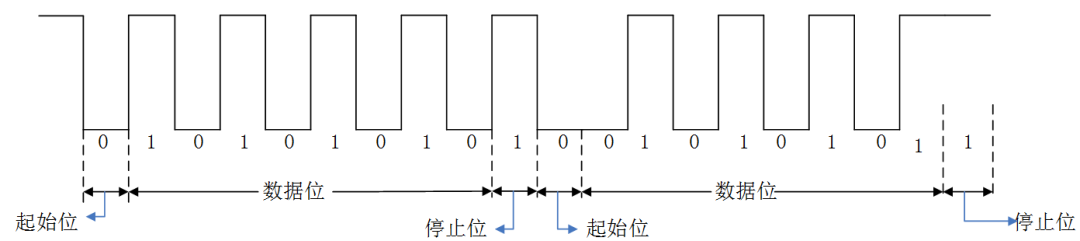
UART作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输。其中各位的意义如下:
起始位:先发出一个逻辑”0”的信号,表示传输字符的开始。
数据位:紧接着起始位之后。数据位的个数可以是5、6、7、8等,构成一个字符。通常采用ASCII码。从最低位开始传送,靠时钟定位。
奇偶校验位:数据位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验数据传送的正确性。
停止位:它是一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。
由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步的容忍程度越大,但是数据传输率同时也越慢。
空闲位:处于逻辑“1”状态,表示当前线路上没有数据传送。
Uart传输数据如图2-1所示:
1.1.2.波特率
波特率是衡量资料传送速率的指标。表示每秒钟传送的符号数(symbol)。一个符号代表的信息量(比特数)与符号的阶数有关。例如传输使用256阶符号,每8bit代表一个符号,数据传送速率为120字符/秒,则波特率就是120 baud,比特率是120*8=960bit/s。这两者的概念很容易搞错。
UART 的接收和发送是按照相同的波特率进行收发的。波特率发生器产生的时钟频率不是波特率时钟频率,而是波特率时钟频率的16倍,目的是为在接收时进行精确的采样,以提取出异步的串行数据。根据给定的晶振时钟和要求的波特率,可以算出波特率分频计数值。
1.1.3.工作原理
发送数据过程:空闲状态,线路处于高电位;当收到发送数据指令后,拉低线路一个数据位的时间T,接着数据位按低位到高位依次发送,数据发送完毕后,接着发送奇偶检验位和停止位(停止位为高电位),一帧数据发送结束。
接收数据过程: 空闲状态,线路处于高电位;当检测到线路的下降沿(线路电位由高电位变为低电位)时说明线路有数据传输,按照约定的波特率从低位到高位接收数据,数据接收完毕后,接着接收并比较奇偶检验位是否正确,如果正确则通知则通知后续设备准备接收数据或存入缓存。
由于UART是异步传输,没有传输同步时钟。为了能保证数据传输的正确性,UART采用16倍数据波特率的时钟进行采样。每个数据有16个时钟采样,取中间的采样值,以保证采样不会滑码或误码。
一般UART一帧的数据位为8,这样即使每一个数据有一个时钟的误差,接收端也能正确地采样到数据。
UART的接收数据时序为:当检测到数据下降沿时,表明线路上有数据进行传输,这时计数器CNT开始计数,当计数器,当计数器为8时,采样的值为“0”表示开始位;当计数器为24=161+8时,采样的值为bit0数据;当计数器的值为40=162+8时,采样的值为bit1数据;依次类推,进行后面6个数据的采样。如果需要进行奇偶校验位,则当计数器的值为152=169+8时,采样的值为奇偶位;当计数器的值为168=1610+8时,采样的值为“1”表示停止位,一帧数据收发完成。
1.1.4.RS232与RS485
UART:通常说的UART指的是一种串行通信协议,规定了数据帧格式,波特率等。RS232和RS485:是两种不同的电气协议,也就是说,是对电气特性以及物理特性的规定,作用于数据的传输通路上,它并不含对数据的处理方式。
对应的物理器件有RS232或者RS485驱动芯片,将CPU经过UART传送过来的电压信号驱动成RS232或者RS485电平逻辑。
RS232使用3-15V有效电平,而UART,因为对电气特性没有规定,所以直接使用CPU使用的电平,即TTL电平(在0-3.3V之间)。
更具体的,电气的特性也决定了线路的连接方式,比如RS232,规定用电平表示数据,因此线路就是单线路的,两根线能达到全双工的目的;RS485使用差分电平表示数据,因此必须用两根线才能达到传输数据的基本要求,要实现全双工,必须使用4根线。
RS232和RS485的区别(1)抗干扰性
RS485 接口是采用平衡驱动器和差分接收器的组合,具有抑制共模干扰的能力,抗噪声干扰性强。RS232接口使用一根信号线和一根信号返回线而构成供地的传输形式,这种共地传输容易产生共模干扰,所以抗噪声干扰性弱。(2)传输距离RS485 接口的最大传输距离标准值为1200 米(9600bps 时),实际上可达3000米。RS232 传输距离有限,最大传输距离标准值为50米,实际上也只能用15米左右。(3)通信能力RS485接口在总线上最多可以连接128个收发器,即具有多站能力,而这样的用户可以利用单一的RS485接口方便的建立起设备网络。RS232只允许一对一通信。(4)传输速率RS232传输速率较低,在异步传输时,波特率为20Kbps.RS485的数据最高传输速率为10Mbps.(5)信号线RS485全双工:uart-tx 1根线,变成 RS485- A/B 2根线;uart-rx 1根线,变成 RS485- x/y 2根线,RS485半双工: 将全双工的 A/B; X/Y 合并起来,分时复用。RS232只允许一对一通信(6)电气电平值逻辑“1”以两线间的电压差为+(2-6)V表示;逻辑“0”以两线间的电压差为-(2-6)V表示。在RS232中任何一条信号的电压均为负逻辑关系。即:逻辑“1”-5-15V;逻辑“0”,+5~+15V,噪声容限为2V。即要求接收器能识别低至+3V的信号作为逻辑“0”,高到-3V的信号的信号作为逻辑“1”。RS232接口的信号电平值较高,易损坏接口电路的芯片,又因为与TTL电平不兼容故使用电平转换电路方能与TTL电路连接。RS485接口信号电平比RS232降低了,就不易损坏接口电路的芯片,且该电平与TTL电平兼容,方便与TTL电路连接。1.1.5.流控
数据在两个串口传输时,常常会出现丢失数据的现象,或者两台计算机的处理速度不同,如台式机与单片机之间的通讯,接收端数据缓冲区以满,此时继续发送的数据就会丢失,流控制能解决这个问题,当接收端数据处理不过来时,就发出“不再接收”的信号,发送端就停止发送,直到收到“可以继续发送”的信号再发送数据。
因此流控制可以控制数据传输的进程,防止数据丢失。PC机中常用的两种流控为:硬件流控(包括RTS/CTS、DTR/CTS等)和软件流控制XON/XOFF(继续/停止)。
1.1.5.1.硬件流控
硬件流控制常用的有RTS/CTS流控制和DTR/DSR流控制两种。
DTR–数据终端就绪(Data Terminal Ready)低有效,当为低时,表示本设备自身准备就绪。此信号输出对端设备,使用对端设备决定能否与本设备通信。
DSR-数据装置就绪(Data Set Ready)低有效,此信号由本设备相连接的对端设备提供,当为低时,本设备才能与设备端进行通信。
RTS - 请求发送(数据)(Request To Send)低有效,此信号由本设备在需要发送数据给对端设备时设置。当为低时,表示本设备有数据需要向对端设备发送。对端设备能否接收到本方的发送数据,则通过CTS信号来应答。
CTS - 接收发送(请求)(Clear To Send)低有效,对端设备能否接收本方所发送的数据,由CTS决定。若CTS为低,则表示对端的以准备好,可以接收本端发送数据。
以RTS/CTS流控制分析,分析主机发送/接收流程:
物理连接
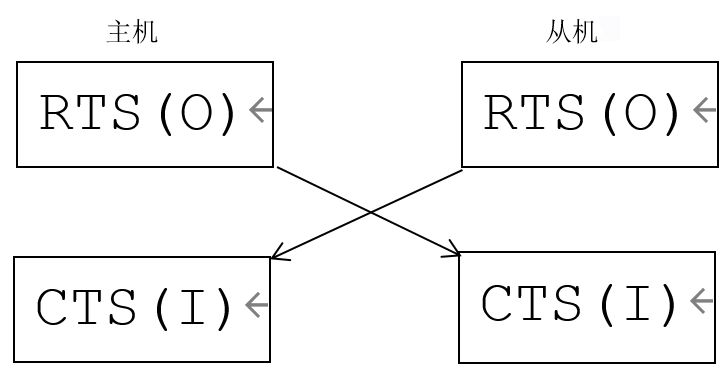
主机的RTS(输出信号),连接到从机的CTS(输入信号)。主机是CTS(输入信号),连接到从机的RTS(输入信号)。
1.主机的发送过程:主机查询主机的CTS脚信号,此信号连接到从机的RTS信号,受从机控制。如果主机CTS信号有效(为低),表示从机的接收FIFO未满,从机可以接收,此时主机可以向从机发送数据,并且在发送过程中要一直查询CTS信号是否为有效状态。主机查询到CTS无效时,则中止发送。主机的CTS信号什么时候会无效呢?从机在接收到主机发送的数据时,从机的接收模块的FIFO如果满了,则会使从机RTS无效,也即主机的CTS信号无效。主机查询到CTS无效时,主机发送中止。
2.主机接收模式:如果主机接收FIFO未满,那么使主机RTS信号有效(为低),即从机的CTS信号有效。此时如果从机要发送,发送前会查询从机的CTS信号,如果有效,则开始发送。并且在发送过程中要一直查询从机CTS信号的有效状态,如果无效则终止发送。是否有效由主机的RTS信号决定。如果主机FIFO满了,则使主机的RTS信号无效,也即从机CTS信号无效,主机接收中止。
1.1.5.2.软件流控
由于电缆的限制,在普通的控制通讯中一般不采用硬件流控制,而是使用软件流控制。
一般通过XON/XOFF来实现软件流控制。常用方法是:当接收端的输入缓冲区内数据量超过设定的高位时,就向数据发送端发送XOFF字符后就立即停止发送数据。
当接收端的输入缓冲区内数据量低于设定的低位时,就向数据发送端发送XON字符(十进制的17或Control-Q),发送端收到XON字符后就立即开始发送数据。
一般可从设备配套源程序中找到发送端收到XON字符后就立即发送数据。一般可以从设备配套源程序中找到发送的是什么字节。
应注意,若传输的是二进制的数据,标志字符也可能在数据流中出现而引起误操作,这是软件流控的缺陷,而硬件流控不会出现这样的问题。
二、Linux serial框架
在Linux系统中,终端是一种字符型设备,它有多种类型,通常使用tty(Teletype)来简称各种类型的终端设备。
对于嵌入式系统而言,最普遍采用的是Uart(Universal Asynchronous Receiver/Transmitter),串行端口,日常生活中简称端口
2.1.TTY驱动程序框架2.1.1.TTY概念2.1.1.1.串口终端(/dev/ttyS*)
串口终端是使用计算机串口连接的终端设备。Linux把每个串行端口都看做是一个字符设备。这些串行端口所对应的设备名称是/dev/ttySAC*;
2.1.1.2.控制台终端(/dev/console)
在Linux系统中,计算机的输出设备通常被称为控制台终端,这里特指printk信息输出到设备。/dev/console是一个虚拟的设备,它需要映射到真正的tty上,比如通过内核启动参数“console=ttySCA0”就把console映射到了串口0
2.1.1.3. 虚拟终端(/dev/tty*)
当用户登录时,使用的是虚拟终端。使用Ctcl+Alt[F1 - F6]组合键时,我们就可以切换到tty1、tty2、tty3等上面去。tty*就称为虚拟终端,而tty0则是当前所使用虚拟终端的一个别名。
2.1.2.TTY架构分析
整个 tty架构大概的样子如图3.1所示,简单来分的话可以说成两层,一层是下层我们的串口驱动层,它直接与硬件相接触,我们需要填充一个 struct uart_ops 的结构体,另一层是上层 tty 层,包括 tty 核心以及线路规程,它们各自都有一个 Ops 结构,用户空通过间是 tty 注册的字符设备节点来访问。
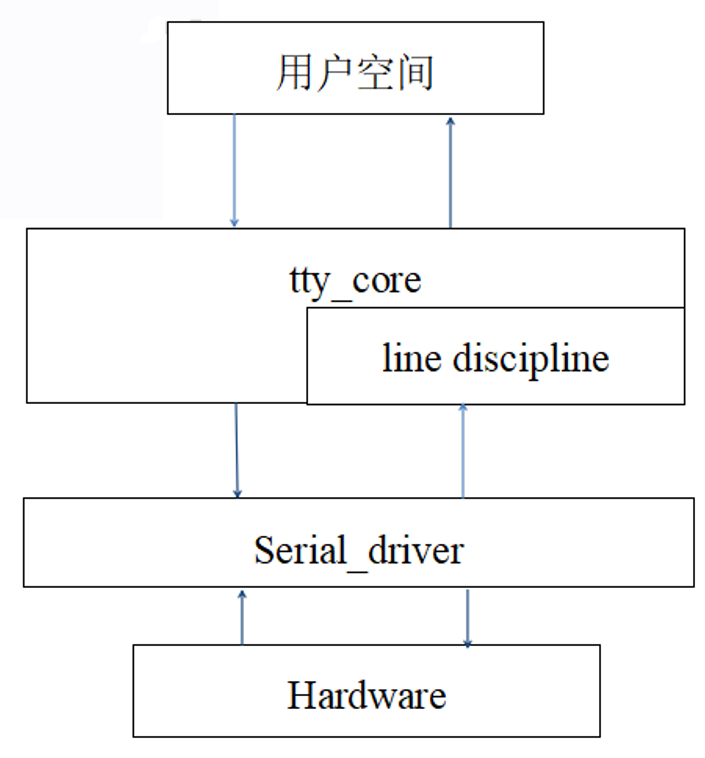
图3.1tty架构图
如图3.2所示,tty设备发送数据的流程为:tty核心从一个用户获取将要发送给一个tty设备的数据,tty核心将数据传递给tty线路规程驱动,接着数据被传到tty驱动,tty驱动将数据转换为可以发给硬件的格式。
接收数据的流程为:从tty硬件接收到的数据向上交给tty驱动,接着进入tty线路规程驱动,再进入tty核心,在这里它被一个用户获取。
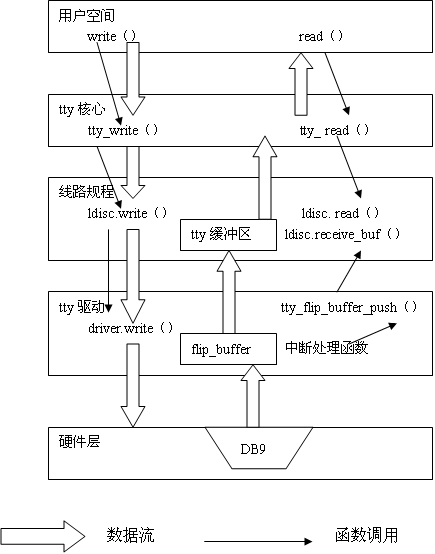
图3.2 tty设备发送、接收数据流程2.2.关键数据结构2.2.1.Struct uart_driver
uart_driver 包含了串口设备名,串口驱动名,主次设备号,串口控制台(可选))等信息,还封装了tty_driver(底层串口驱动无需关心tty_driver)
struct uart_driver {
struct module *owner; 拥有该uart_driver的模块,一般为THIS_MODULE
const char *driver_name; 驱动串口名,串口设备名以驱动名为基础
const char *dev_name; 串口设备名
int major; 主设备号
int minor; 次设备号
int nr; 该uart_driver支持的串口数
struct console *cons; 其对应的console,若该uart_driver支持serial console,
*否则为NULL
* these are private; the low level driver should not
* touch these; they should be initialised to NULL
struct uart_state *state; 下层,窗口驱动层
struct tty_driver *tty_driver; tty相关
2.2.2.struct console
实现控制台打印功能必须要注册的结构体
struct console {
char name[16];
void(*write)(struct console *,const char *, unsigined);
int (*read)(struct console *, char *, unsigned);
struct tty_driver *(struct console *,int*);
void (*unblank)(void);
int (*setup)(struct console *, char *);
int (*early_setup)(void);
short flags;
short index; 用来指定该console使用哪一个uart port (对应的uart_port中的line),如果为-1,kernel会自动选择第一个uart port
int cflag;
void *data;
struct console *next;
};
无相关信息