仙知小课堂:可视化操作软件Roboshop操作指南——重定位
仙知小课堂:可视化操作软件Roboshop操作指南——重定位Roboshop作为仙知机器人自主研发的可视化操作软件,集成了机器人控制,地图构建及编辑,机器人建模等移动机器人应用中常
Roboshop作为仙知机器人自主研发的可视化操作软件,集成了机器人控制,地图构建及编辑,机器人建模等移动机器人应用中常用的功能,界面友好、操作简便。为方便用户使用,继上期介绍了机器人连接及地图构建的操作方法,本期来介绍【重定位】功能:
重定位
用于使机器人获得正确的定位状态。通过指定一个比较模糊的初始定位点和方向,让机器人自己计算其精确的位置和方向。重定位也是使机器人能进入正确工作状态的重要一步。
注:使用此功能,机器人当前所加载的地图与软件当前所使用的地图必须保持一致;机器人位置正确时,不需要使用【重定位】功能
如何判断机器人位置是否正确?
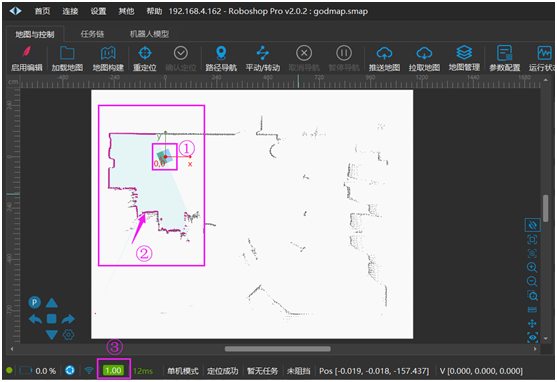
打开软件,成功连接机器人后,进入【地图与控制】界面,我们可以看到当前机器人的在软件地图中的位置,激光匹配度和其当前所处位置的置信度,如上图所示:
①为机器人当前在软件地图中所处的位置。
②为机器人所发出的激光与地形轮廓所形成的激光匹配点。
③为机器人当前的置信度(置信度越高,说明机器人的位置越准确)。
通过上图,我们可以看到机器人的激光和地图轮廓的匹配度是很高的,且置信度也很高,那么可以判断当前机器人的位置是正确的,此时是不需要使用【重定位】按钮来对机器人进行重定位操作的。
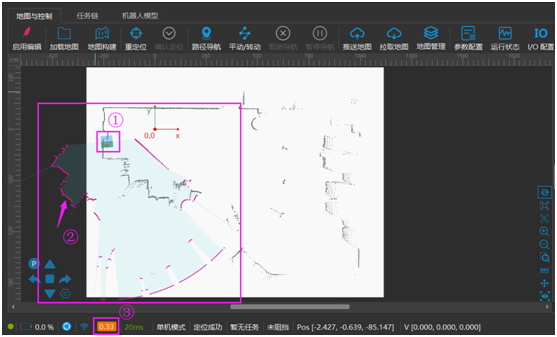
当机器人所在真实空间中的位置和软件地图中的机器人位置不一致时,如上图所示:
①机器人的位置不正确。
②激光与地图中的轮廓不匹配。
③置信度过低
这时候,我们需要对机器人进行【重定位】操作,完成该操作后方可正常使用机器人。
如何进行重定位?
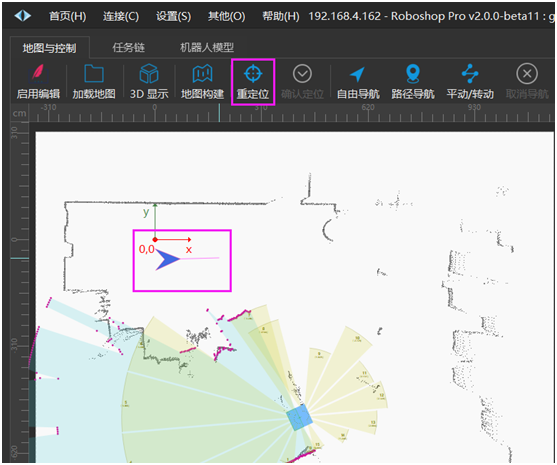
第一步:点击【重定位】按钮,在软件地图中选择机器人所处在真实空间中的位置,点击鼠标左键并拖动方向(该方向为机器人的朝向):
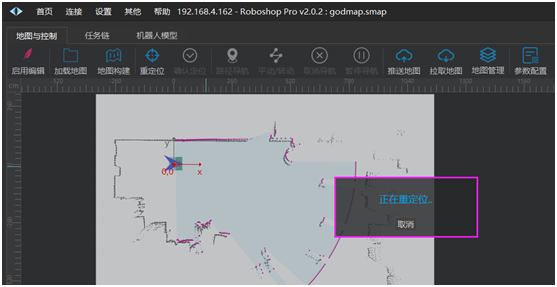
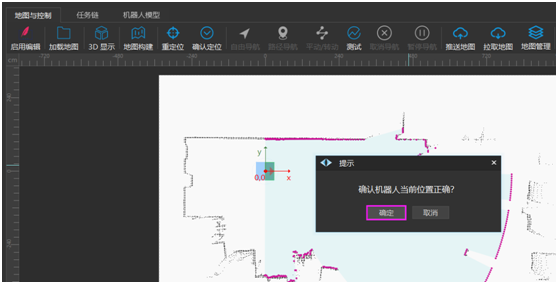
第二步:在重定位的过程中,弹出【正在重定位……】的对话框,如下图所示:
第三步:等待重定位完成后,在确认位置对话框中,点击【确定】按钮:
第四步:重定位完成后,需要检查机器人的位置是否正确,激光与地图轮廓是否匹配,置信度是否较高。如下图所示:我们可看到图中机器人激光和地图的轮廓的匹配程度是很高的(可通过观察一些特殊轮廓的激光匹配度,例如图中箭头所指示方向),则本次【重定位】操作成功完成,即可正常使用机器人。
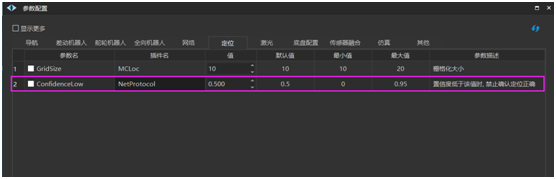
注:①当置信度低于0.5(默认值)时,软件是不允许确认定位成功的,如下图所示:

该数值也可以通过【参数配置】进行修改,修改如下参数即可:
②使用该功能时,选择机器人的位置和朝向是允许一定范围的误差,机器人会自动计算自己所处的位置和方向,并进行校正。但如果所选择的位置与方向超出了所允许的误差范围,则可能会出现定位不准确的情况,请缩小范围再试;
使用该功能时,若出现多次【重定位】后,依然出现定位不正确的情况,请检查所选择的位置与机器人的朝向是否与真实空间中的一致。
-
让机器人变聪明的“好奇心”2019-06-11
-
现代机器人之父再出发 为工业机器人建立一个更好的大脑2019-06-11
-
蜂鸟三大场景布局无人配送 机器人已完成56万单配送任务2019-06-11
-
泛人工智能简报:十年内机器人取代全世界所有仓库岗位2019-06-11
-
Telexistence智能机器人成为人类分身 上演隔空取物和远程旅游2019-06-11
-
机器人玩漂移板 颠簸路段依然保持平衡2019-06-10
-
为了培训快递机器人,亚马逊为其构建3D地图模型2019-06-10
-
亚马逊加速机器人培训:一夜模拟数千次外卖交付2019-06-10
-
韩国将研发军用仿生机器人2019-06-10
-
小罗伯特-唐尼代言:利用AI支持型机器人清理自然环境2019-06-10
-
世界机器人大赛中国赛区西北选拔赛在宁夏举办2019-06-10
-
日本建立首支机器人消防队2019-06-10
-
日本机器人“妻子”遭宅男哄抢,日本宅男:功能强大,谁试谁知道2019-06-10
-
机器人会成为未来餐厅的标配吗?2019-06-10
-
多款新型机器人亮相亚马逊全球人工智能会议2019-06-10