首个自动驾驶技术开放日上 腾讯释放了哪些信息
首个自动驾驶技术开放日上 腾讯释放了哪些信息时隔不久,早在自动驾驶领域有所布局的腾讯再次出现在公众视野,区别于此前,此次腾讯首次面向社会单独为自动驾驶业务举办了技术开放日。12月7
时隔不久,早在自动驾驶领域有所布局的腾讯再次出现在公众视野,区别于此前,此次腾讯首次面向社会单独为自动驾驶业务举办了技术开放日。12月7日,腾讯自动驾驶总经理苏奎峰、仿真业务负责人孙驰天、数据云平台产品负责人王钰悉数到场,详细为现场人员介绍了其在自动驾驶领域的战略布局。
即便将时间定在周末,腾讯总部大厦二层的这间小会议室里依旧座无虚席。开放日正式举行的一周前,腾讯就在名为“腾讯产业互联网”的公号上开放了报名通道,当天到场的有来自整车厂、科技公司等对自动驾驶感兴趣的百名人士。大厦之外,还停放着几辆腾讯改装的自动驾驶汽车。
会议现场,苏奎峰再次重申了“腾讯不造车,也不做硬件”的初衷。明显,做好软件和服务才是腾讯的目标,他们将服务对象瞄向车企。
基于数据平台、模拟仿真和高精度地图三大基础平台,腾讯自行研发了融合定位、环境感知、决策规划等核心算法,主要针对L2以上场景产品研发,提供模块化软件和服务,助力自动驾驶产品快速落地。

但要想实现自动驾驶量产应用,企业必须将用户需求作为首要考虑要素。苏奎峰认为,上下班通勤拥堵和长途旅行驾驶疲劳两种特定情况,已经成为目前用户在出行方面的痛点。为解决此问题,腾讯自动驾驶正在推进高速巡航(HWP)与拥堵巡航(TJP)相结合的解决方案,力求在国内120 km/h的限速前提下,实现纵向和侧向跟车(包括上下匝道等)功能。
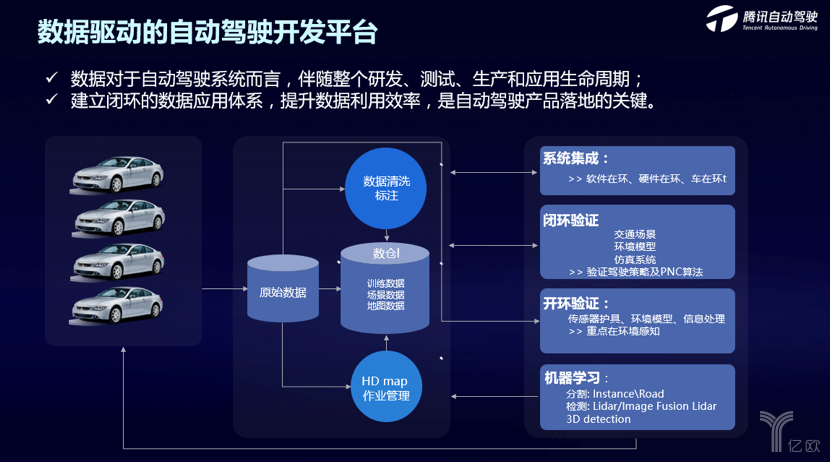
该功能的实现需要大量数据做驱动。所以,如何高效收集和利用数据,如何提高数据循环链路速度,如何利用数据做测试验证,成为制约自动驾驶技术迭代的关键。对此,腾讯开发了自动驾驶数据云平台和TAD Sim自动驾驶模拟仿真平台,而这两个平台的构建需要建立在高精地图的基础之上。因此,高精地图也被腾讯摆在了重要战略位置上。
自动驾驶数据云平台方面,腾讯通过线上工具链,进行算法预标注,以实现样本自动化生产,其中包括全要素目标检测、跨相机目标跟踪、语义分割等图像标注、3D激光点云标注、以及精准图像与3D点云融合标注、变道标注等多种自动驾驶研发专用样本。“区别于线下工具,云端标注能够平均节省50%以上的人工标注成本。”王珏表示。
与此同时,该云平台还能提供便捷图形化界面交互、KPI评测体系等算法训练评测服务,并能够支持大规模场景数据集检索使用的统一数仓管理服务。
基于以上功能,腾讯自动驾驶数据云平台不仅能够为车企及自动驾驶开发、测试及运营部门,提供软硬件开环系统的测试验证、典型交通场景的闭环验证、传感器模型及其它环境模型验证。同时还能提供自动驾驶车队管理调度、运行监控、轨迹跟踪、在线反馈,以及高精度地图、算法模型、软件OTA升级等整套服务。
自动驾驶模拟仿真平台方面,依托于在游戏领域的技术积累,腾讯将游戏引擎、工业级车辆动力学模型、虚实一体交通流等技术应用在其仿真平台TAD Sim,利用场景编辑器、路采数据、和数据交通流生成虚拟场景,提供场景型云仿真和虚拟城市型云仿真两种模式,对自动驾驶技术进行测试验证。
孙驰天称,有别于传统模拟测试软件,腾讯更加注重数据的利用率,凭借云端运行的方式,其能够利用现有数据资源生成更多场景。除测试验证自动驾驶技术外,腾讯的模拟仿真平台还可以为政策制定部门、交通管理部门提供交通调度管理、道路及交通规划、自动驾驶法规研究等方面的测试。
作为两个平台构建基础,在高精地图的布局上,腾讯一方面在云端存储大量数据,形成数据闭环体系,实时反映在高精地图中;另一方面,其能够在车端实时观察地图,一旦发现出现变化,就采用众包方式去验证和更新地图,以保持其精度和鲜度。
据孙驰天介绍,通过高精度地图,TAD Sim可以完成不同环境下的几何模拟,以及测试车辆的感知能力、决策能力、和车辆控制的模拟仿真。
截至目前,基于以上三大基础平台(数据平台、模拟仿真、高精度地图),成立近四年的腾讯已基本构建了自动驾驶核心能力。对于腾讯而言,接下来要做得是将业务重点放在技术迭代和做好用户服务上。
会后,苏奎峰、孙驰天、王钰共同接受了包括亿欧汽车在内的核心媒体的采访。
以下为采访实录(有删改):
Q:腾讯对自己的定位是什么?只做软件服务商的话,未来将如何适配硬件?
苏奎峰:腾讯的定位是提供软件和服务,助力车厂自动驾驶业务快速落地。未来,我们会把更多资源投入到能够助力车厂的软件服务、供应链、核心软件上面。关注好客户需求,做好用户服务。
但腾讯只提供软件,不代表不碰硬件,因为软件需要基于整车硬件进行优化。首先,在软件架构设计层面,我们会尽可能搭建一个能够兼容各个平台的算法;其次,我们会针对不同车型和厂家进行优化。由于自动驾驶对算法算力要求高,底层优化非常关键,一定要做到适配,这个步骤一定不能绕过去。所以,针对硬件的优化也是软件的一部分。
Q:现在腾讯的仿真平台需要多少机器资源?仿真场景能不能和实际路测场景相匹配?
孙驰天:腾讯云是可扩展的,现在是根据我们提交的需求来扩展资源。我们提交的场景越多,腾讯云给到的资源就会越多,这是动态的。从现实来看,虚拟场景和真实场景是能对应上的。真实场景的路测,可以在仿真系统里复现和测试。但仿真系统测试完之后,如何能在路上做一模一样的测试,很难,除非找个演员。
Q:腾讯仿真平台的最大卖点是什么?
孙驰天:我们比较重视数据的利用率,也就是如何能最大限度把采集的数据利用起来。我们更重视如何用现有数据资源生成更多场景,这需要很大算力,我们主要在云上运行,这是我们和传统车辆仿真软件比较大的一个区别。
苏奎峰:自动驾驶需要大量数据来做一些基于数据的验证,这不单纯是仿真自己的问题,还是生成技术手段的问题。因此我们的云端、感知、决策,所有团队都会助力仿真团队做好这件事。同时,腾讯在游戏、AI方面都有一定的技术积累,能为仿真提供帮助。
Q:在数据采集标注和仿真方面,目前腾讯的付费模式是什么?
苏奎峰:仿真方面,我们会根据客户需求,提供单机版和云端版。会为客户提供基础配置,也会根据客户需求提供不同配置,至于服务费和运维方式,是要具体谈的。标注的话就按标注的章,都有计费方式去收费,如果客户有测试资质,我们可以提供从采集到标注的一条龙服务,如果客户已经有数据了,需要我们标注,我们只提供标注服务也可以。现在市场上也有一些小标注公司的成本也很低,但不知道他们是不是合法合规经营,腾讯的态度是,国家法律规定是红线底线,绝对不会碰。
Q:在高精地图实时更新这方面,腾讯目前是在测试阶段?是通过众包方式实现更新的吗?
苏奎峰:对,云端和车端的验证,我们技术层面都打通了。依靠很多车在马路上跑,才能更新自动驾驶数据,而不是通过再采集、再分析的方式。当然这是低成本的数据更新,这两个不太一样。
更新分两种,一种是大规模众包方式,前提条件是我已经有一定的基础。还有一种情况是,如果新修一条路,我们一定要拿激光先采一遍,做一个底图上去。不同的更新有不同方法和策略,但都是为了保证高精地图的可靠性、准确性、实时性。单独派采集车的话,周期比较长,频率很低。但如果有上百万辆自动驾驶车去跑,会回传很多数据,自动驾驶车本身也有感知能力,很多已经检测到了,分辨出了差异化,再传回来,实现更新。
Q:除众包之外,腾讯通过怎样的自由手段更新高精地图?
苏奎峰:比如V2X、5G路测的一些节点。但像目前基础设施还无法覆盖足够大的范围,5G的成本也很高,这就要考虑商业化问题。如果只更新五公里、十公里、一百公里的示范区,是没有问题的,各种手段都可以,但是要在全国范围内一遍遍刷新的话,就存在一定的商业逻辑在里面。
Q:关于高精地图制作成本,腾讯成本大概是在什么量级?现在来看,城市内道路的高精地图采集成本是比较高的吗?
苏奎峰:量级差别还是蛮大的。城区道路的要素很多,环境也差。采集时,城区的车辆多,拥堵情况多。这种情况下,地面的要素就看不到了,可能这次看了20%,下次再堵的时候,又看了20%,就需要一次一次采集。我们现在还没有大规模生产。小规模生产和大规模生产也有很大差异性,很难横向比较。
现在看来城市内道路的采集成本有点高,但也未必,主要取决于技术手段和技术实力。
Q:腾讯现阶段的业务重心是不是在HWP和TJP方面?
苏奎峰:这是我们落地的一个方向,比如仿真云,我们布了大量人力,但在这过程中,我们L4也在做测试,做技术迭代。当下不会投入太多资源,比如把50%或者80%的资源放在L4,不会的。我们资源会有倾斜,倾斜到当下产业阶段,产业需要什么,我们就做什么。
Q:腾讯以后会不会去掉激光雷达,走与特斯拉相似的路线?
苏奎峰:激光雷达去不去掉,是取决于场景的。现在一些激光雷达的距离、激光点的密度远远满足不了未来真正自动驾驶的需求,我们需要更好的激光雷达。现阶段很难拿到满足要求的激光雷达,并不代表不做激光雷达。没有激光雷达,很多场景是解决不了的,尤其是城区这种场景。现在,早期买的激光雷达基本都需要替换,激光雷达没有想象得那么好,尤其机械部件,容易随着时间的增加而磨损,但他又对光学要求很高,时间一长,会出现很多问题。
作者:张男
-
Apollo组织架构升级,百度自动驾驶落地提速2019-12-11
-
推动智能网联汽车产业创新发展 中关村科学城成功举办自动驾驶汽车嘉年华2019-12-11
-
首个自动驾驶技术开放日上,腾讯释放了哪些信息?2019-12-11
-
腾讯云IoT产品专家胡李伟:智能物联平台助力企业2019-12-10
-
宣布在美启动自动驾驶出租车试点项目,博世、奔驰两年合作“交答卷”2019-12-10
-
美自动驾驶初创公司May Mobility完成B轮5000万美元融资2019-12-10
-
自动驾驶出租车,巨头们的应许之地?2019-12-09
-
自动驾驶出租车,巨头们的应许之地2019-12-09
-
自动驾驶汽车公司May Mobility获5000万美元B轮融资,Toyota Motor Corp领投2019-12-09
-
我国600公里时速磁悬浮列车亮相:自动驾驶 30年免维护2019-12-09
-
Waymo 的自动驾驶出租车应用已上架 App Store2019-12-06
-
AR让自动驾驶更清楚的了解道路威胁(二)2019-12-06
-
腾讯医疗AI研究成果夺冠全球放射学顶会RSNA 2019 AI 挑战赛2019-12-06
-
独家:阿里巴巴投资的初创公司AutoX已申请加州自动驾驶测试许可不配备人类驾驶员2019-12-06
-
腾讯钟翔平:从最大变量到最大增量,AI助力教育创新2019-12-05