3D相机选型指南 你知道自己需要什么样的3D相机吗?
3D相机选型指南 你知道自己需要什么样的3D相机吗?随着3D成像技术日趋成熟,3D相机已经出现在日常服务、金融支付、物流分拣、加工制造等越来越多的应用场景中。但仍有许多使用者由
随着3D成像技术日趋成熟,3D相机已经出现在日常服务、金融支付、物流分拣、加工制造等越来越多的应用场景中。但仍有许多使用者由于不甚了解不同类型3D相机之间的差异,在进行设备选型时存在诸多困惑。本文将系统介绍各类3D相机的基本原理、特点以及相互之间的差异,帮助您更好地完成相机选型。
什么是3D相机
普通数码相机输出的图像以二维像素网格构成。依据每个像素的属性将其定义为红色(Red)、绿色(Green)、蓝色(Blue),通常称为RGB。不同属性的像素可以用0-255的数字来表示,例如,黑色的相应值为(0,0,0),纯鲜红色的相应值是(255,0,0)。成千上百万的像素可以构成我们常见的照片。

知象光电高精度3D相机Ailook 支持3D实时成像
3D相机的不同之处在于,它可以测量普通数码相机无法测量的深度数据。所谓深度数据,就是像素到相机的距离。所以3D相机可以获取四个值,分别是RGB值和深度信息,即RGB-D。
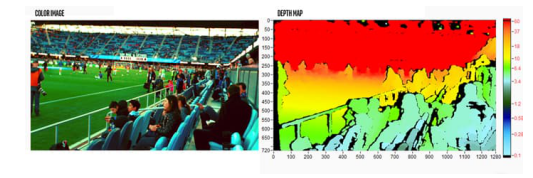
3D相机输出的深度信息可以通过不同的形式显示出来。在上图示例中,左边为彩色图,右边为深度图。深度图中的不同颜色,表示像素到相机的距离,青色表示距离相机最近,而红色则表示距离相机最远。其实深度图的显示,使用什么颜色不重要,只是为了便于识别。
3D相机的常见类型
3D相机通过其使用的深度数据计算方式来进行分类。不同类型的3D相机都有其优点与限制性,所以选取何种3D相机,就取决于使用者的实际需求。常见的选型要素有:最远测量距离、最高精度、是否支持户外使用这三点。
1.结构光与编码光
结构光3D相机与编码光3D相机都是通过光源发射器投射光(通常是红外光)到物体。所投射的光是有特定图案的。这种特定的图案,可以从视觉层面进行设置,也可以从时间层面进行设置,还可以是这两个方式的结合。由于光投影的图案是既定的,所以3D相机的内置传感器通过识别场景中的图案就可以获取到深度信息。例如下图,如果光的既定图案是一系列条纹,当它投射到一个球上,这些条纹将会依据球的表面产生特定形变,且当球靠近光源发射器时,图案还会发生相应的改变。
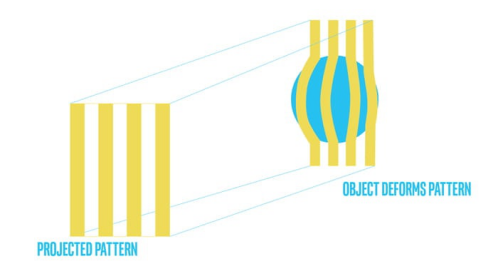
利用既定图像与相机识别到的实际图像之间的差异,可以计算出每个像素到相机的距离。这项技术的核心是需要精准识别所投射的光的图案。但是相机投射出的光的功率会因为距离变大而衰减,还会受到环境中其他相机或设备发出的红外线噪音的干扰,因此,编码光和结构光相机适合在室内,进行短距离作业。
知象光电工业3D相机Surface 采用双目红外结构光技术
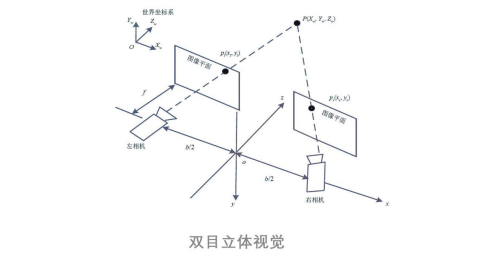
2.立体视觉
立体视觉相机依据内置的传感器数量可分为单目立体视觉相机(内置单个传感器)与双目立体视觉(内置两个传感器)相机。由于它们工作原理相同,以下举例均以双目立体视觉技术为例进行介绍。立体视觉相机常利用红外光来提高测量精度,并且可利用一切光进行测量,这一点不同于上文介绍的编码光或结构光3D相机。双目立体视觉相机内置两个传感器,可以分别得到出两组图像的深度信息。由于传感器之间的距离是已知的,通过计算便可以得到被测对象的深度信息。
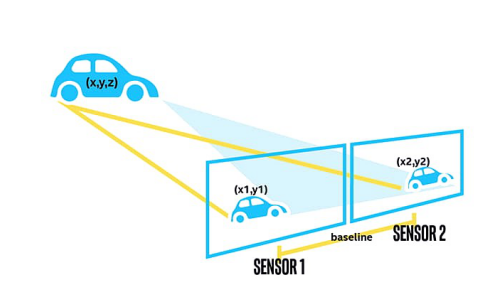
双目立体视觉相机的工作原理,与人眼进行深度感知的原理类似。人的两眼分别可看见一幅图像,大脑可以计算出两眼之间的差异,距离物体近的一只眼所识别出的物体移动幅度更大,而距离物体远的一只眼所识别出的移动幅度就就小一些。
双目立体视觉相机在大多数照明条件下,甚至是户外,它都能保持良好的性能。如为其配置红外光发射器,那么即使在光照条件差的环境中,它依然能敏锐感知深度信息。双目立体视觉相机的另一个优点是,在特定场景中,相机的使用数量是没有限制的,不会出现多个编码光相机或TOF相机同时使用时出现的互相干扰的问题。
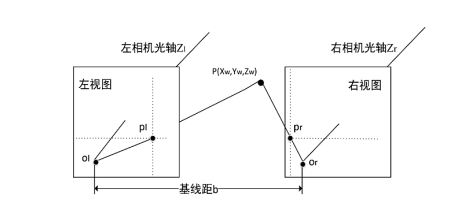
双目立体视觉相机所能测量的距离取决于两个内置传感器之间的距离,也就是基线距离。基线距离越宽,相机可测试的距离就越远。事实上,天文学家们使用一种相似的技术来测量恒星距地球的距离。先测量一颗恒星在天空中的位置,六个月后,当地球运转到轨道中离原始测量点最远位置时,再次测量同一恒星位置。这样,天文学家就可以利用大约3亿公里的基线距离计算出恒星距离地球的位置(恒星的深度信息)。
3.TOF相机
每种3D相机都依赖已知信息来推断深度信息。例如,在立体视觉技术中,基线距离是已知的。在编码光和结构光技术中,光的图案是已知的。而在TOF技术(Time of Flight)方面,光速则是用来计算深度的已知变量。
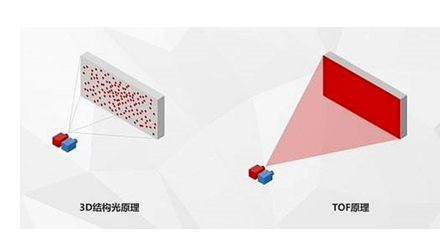
所有类型的TOF相机都会发射某种光线,用来扫射全场,然后测算光反射回来的时间。根据光的功率和波长,TOF相机可适用远的距离的测量工作,例如,用TOF相机在直升机上进行地图绘制的相关测量工作;汽车自动驾驶中常使用的激光定位器。
TOF相机的缺点是,在相同空间内,其他相机的光会对它们造成较强干扰,而且在室外环境下也不适用。
你能用3D相机做什么?

知象光电工业3D相机Raygo 重复精度最高可达5μm
3D相机可以让任何设备和系统不需要人工干预的方式理解场景。虽然计算机可以实现理解二维图像,但这需要投入大量的时间和成本来训练机器学习网络。3D相机本身可提供一些无需训练便可识别的信息,例如,3D相机可直接区分前景、背景、场景,从图像中剔除背景物,这对于需要分割背景的相关应用中非常有帮助。
本文为解释3D相机的类别及工作原理,列举了一些应用场景。而实际上,3D相机可应用的范围远比这广泛的多。未来,3D视觉技术不仅能帮助设备看得更远、更立体,更精准,同时还能联合人工智能,助力更多领域的升级、创新。
西安知象光电科技依托西安交通大学、中科院西光所、麻省理工学院等著名研究机构,研发结构光3D成像模组核心硬件技术和3D人工智能算法,打造高精度3D成像国际品牌。公司产品已销往国内、海外的消费电子、医疗健康、军工安防、文化教育、工业检测等市场。投资人包括国中创投、深创投、软银中国、中科创星等。
-
3D相机选型指南 | 你知道自己需要什么样的3D相机吗?2019-12-05
-
网信办联合广播电视总局明确“深度伪造”音视频管理规定2019-12-02
-
迎接中国硬核新巨头 | 亿欧深度2019-11-29
-
380分钟深度体验,骨传导耳机是噱头or黑科技?2019-11-28
-
HUAWEI HiCar走向深度生态开放,助力汽车成为下一个超级终端2019-11-27
-
深度丨EDA 风云2019-11-27
-
Ai芯天下丨报告丨《机器人行业深度分析》:机器人产业价值和回报相关度分析2019-11-25
-
发光广告字3D打印市场的深度分析 (2015-2019年市场分析报告)2019-11-23
-
人工智能+脑机接口:让我们距离“增强人类”越来越近2019-11-22
-
别再拍路人照了!看看哪款照相机适合你!2019-11-09
-
涂鸦智能携手多家欧美领导品牌,于进博会达成深度合作2019-11-07
-
自主研发!工业3D相机国产化之路已越走越好2019-11-06
-
飞企互联:园区只有深度运营才能实现真正的智慧2019-11-06
-
以AI中台降低客户开发成本,“深度赋智”完成数百万元种子轮融资2019-11-04
-
深度智耀与中国医药签署全面战略合作协议,开创AI制药新局面2019-11-04