
五部门关于开展2024年新能源汽车下乡活动的通知
FPGA数字信号处理之CORDIC算法
来源:新能源汽车网
时间:2023-03-08 12:07:19
热度:
FPGA数字信号处理之CORDIC算法CORDIC(Coordinate Rotation Digital Computer)算法即坐标旋转数字计算方法。该算法通过基本的加和移位运
CORDIC(Coordinate Rotation Digital Computer)算法即坐标旋转数字计算方法。该算法通过基本的加和移位运算代替乘法运算,用于三角函数、双曲线、指数、对数的计算。CORDIC算法的思想是:反复迭代,逐次逼近终值,计算结果达到一定精度即可终止。比如下边图中任意坐标0 [10,20],计算它的角度值,使用cordic算法就是三角函数不断的旋转坐标系,做法就是:1、将该点0顺时针旋转π/2,得到点1;
2、由于点1位于第四象限,说明转多了,再往逆时针方向转π/4,得到点2;3、点2位置象限,顺时针旋转π/8,得到点3,
4、由于点3位于第四象限,说明转多了,再往逆时针方向转π/16,得到点4;5、点4位置象限,顺时针旋转π/32,得到点5....(根据所需精度,确定旋转次数即可)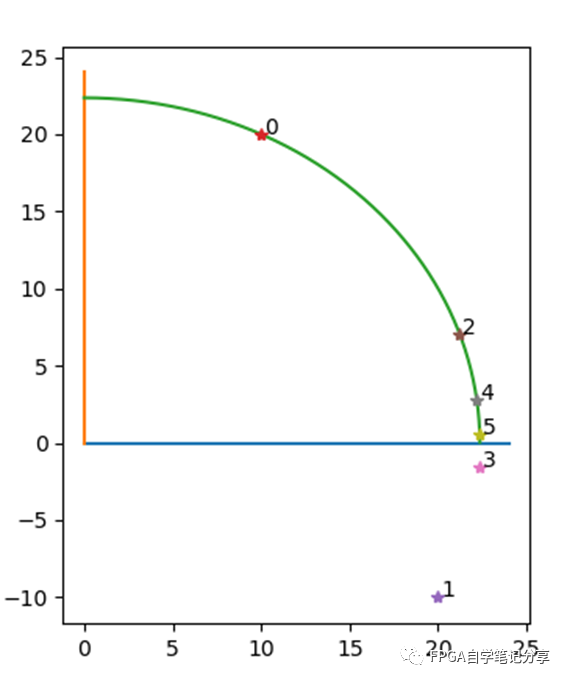
2、由于点1位于第四象限,说明转多了,再往逆时针方向转π/4,得到点2;3、点2位置象限,顺时针旋转π/8,得到点3,
4、由于点3位于第四象限,说明转多了,再往逆时针方向转π/16,得到点4;5、点4位置象限,顺时针旋转π/32,得到点5....(根据所需精度,确定旋转次数即可)

终把旋转的角度求和就得到了任意坐标[10,20]的角度值,其中坐标旋转用的三角函数公式为:
X1=cos(θ)(X0-Y0*tan(θ))
Y1=cos(θ)(Y0+X0*tan(θ))上边的例子能说明cordic算法的思想,在确定旋转次数之后,每次旋转的cos(θ)和tan(θ)值是确定的,这样我们就可以用提前存储的cos(θ)和tan(θ)值去计算任意坐标的角度值。
但是上面角度旋转过程中用到了乘法运算,并没有简化运算量。接下来对cordic进一步优化,将上式中的cos(θ)舍弃,得到如下的结果:
循环过程中Y的正负判断象限,决定旋转方向,但是X/Y坐标会向外无限循环,这时候旋转得到的X/Y坐标会扩展很多倍,如下图,注意下图中的坐标轴刻度是1E17。
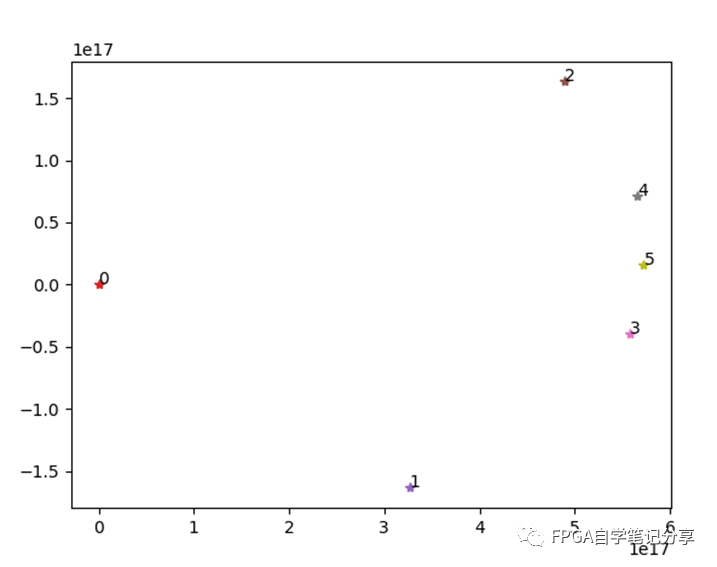
上述旋转过程的计算变化成了:
X1=(X0-Y0*tan(θ))
Y1=(Y0+X0*tan(θ))每次旋转减少了两个乘法,在需要知道正确坐标值的情景下,比如要知道该信号的幅度,由于cordic算法的旋转测试是确定的,所以cos(θ)确定的,所以cos(θ1)*cos(θ2)*cos(θ3)*...*cos(θn)是一个定值,只需要在旋转之后将的X/Y值与cos(θ1)*cos(θ2)*cos(θ3)*...*cos(θn)这个定值相乘即可。上面的旋转过程还是用到了乘法,乘法依然是FPGA/IC中的紧俏资源,下一篇文章介绍如何不用乘法的在FPGA中实现CORDIC。上一篇:电解电容选型看哪些参数


-
定义行业新坐标!瑞华智能携多款产品亮相2022深圳国际充电设施产业展2022-08-02
-
基于MATLAB&SIMULINK开发自动驾驶系统第一讲之传感器配置和坐标系转换2022-02-22
-
寻找合资车企新坐标:破解人才难题2022-02-21
-
寻找合资车企新坐标:智能化从混沌走向清晰2022-02-18
-
寻找合资车企新坐标:反攻电气化2022-02-16
-
寻找合资车企新坐标:从运营产品到运营用户2022-02-16
-
多赛道多品牌,重塑百年汽车产业,东风日产厘定新坐标2022-01-17
-
利用0至1V模拟乘法器实现电池供电系统的精确功率管理2016-06-15