
五部门关于开展2024年新能源汽车下乡活动的通知
车道保持辅助系统LKA性能测试方法和流程
来源:新能源汽车网
时间:2022-03-16 08:13:10
热度:
车道保持辅助系统LKA性能测试方法和流程在智能驾驶相关功能测试中,都是从测试条件、测试系统安装与配置,测试流程及测试是否通过的KPI几个方面来看。测试条件性能评估测试方法由于实现干

在智能驾驶相关功能测试中,都是从测试条件、测试系统安装与配置,测试流程及测试是否通过的KPI几个方面来看。
测试条件
性能评估测试方法
由于实现干预的执行器不同,例如转向扭矩或转向角与单边制动,有必要定义一个测试,针对上面两个系统都能通过。
环境条件
- 测试地点应在平坦、干燥和清洁的沥青或混凝土表面。
- 温度范围应在-20℃和+40℃之间。
- 风速应小于3米/秒。
- 水平能见度范围应大于1公里。
- 测试地点的可见车道标记应处于良好状态,符合国家规定的可见车道标记。同时,应按照适用的车道标识设计和材料标准进行标识。
其中测试条件包含测试环境条件、测试道路条件、测试车辆条件等方面。
测试道路条件:
该路线应足够长,以保持最低的车辆速度(至少20米/秒),同时允许车辆以较低的偏离率从车道上漂移出去。
根据类似公路的适用规定,车道标记的宽度应在0.1米至0.3米之间。
根据类似公路的适用规定,相对于车道标线中心的车道宽度应在3.4米至3.9米之间。
测试车辆条件:
测试车辆的质量应介于整车路缘质量1)加上驾驶员和测试设备(驾驶员和测试设备的总质量不应超过150公斤)和最大授权总质量2)之间(参照ISO 15037)。测试程序开始后,不得进行任何改动。
注1:整车重量包括润滑油、冷却液、清洗液、燃料、备胎、灭火器、标准备件、卡盘和标准工具箱。
注2:授权的最大总质量由行政当局确定为最大值。
测试系统安装与配置:
LKAS应按照OEM提供的说明进行安装和配置。对于带有用户可调干预阈值的LKAS的测试,每次测试都应在干预阈值的最新设置下进行。一旦测试程序开始,就不得对系统进行任何改动。
测试流程:由于不同的系统概念,至少要满足 "直线上的测试流程 "或 "曲线上的测试流程 "中的一个测试流程。
可从数据记录中恢复的参数:以下参数可从数据记录中恢复:
a) 侧向加速度
b) 离开的速度
c) 车辆速度
对于测试期间发生的LKAS的所有车道保持动作,应记录上述数据。这些数据应通过系统以外的设备进行恢复。测试设备的精度应在测试报告中注明。
直线道路测试流程:
测试流程包括八个单项测试。
测试应在一段直路上进行,车辆将以20米/秒至22米/秒的速度沿该段直路直线行驶。当沿着这段直路直行时,车辆可以在车道中央行驶,也可以沿着与偏离车道时将穿过的车道标记相反的车道标记行驶。例如,当车道偏离向右行驶时,车辆可以沿着左侧的车道标线行驶,反之亦然。
在保持指定速度,车辆平稳跟踪路线,使其姿态稳定的情况下,车辆应转向,以便以离开速度V_depart = 0,4 m/s ± 0,2 m/s轻轻离开车道,进行八次测试[四次向左(第一组),四次向右(第二组)] 。测试员应根据相对于车道标线的偏离率进行车道偏离试验,直到每组内达到四次试验。汽车OEM应规定两个连续测试之间的最短持续时间,以避免系统不可用,例如,由于滥用预防措施。
由于实现干预的执行器不同,有可能在自由(脱手,不施加外部扭矩)方向盘或固定方向盘的情况下进行这些测试。这些测试应使用自由方向盘或固定方向盘通过。
如果车辆轮胎的外缘没有超出车道边界超过LKAS_Offset_max,则一次测试成功。
对于轻型车辆,LKAS_Offset_max = 0,4米
重型车辆的LKAS_Offset_max = 1,1米
如果所有八项测试都成功,则测试程序成功通过。
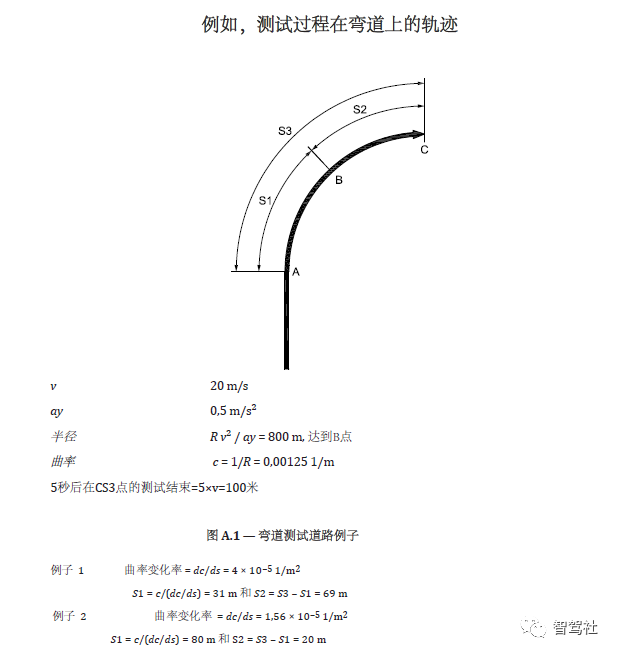
弯曲道路测试流程:
测试流程包括两个单一的测试。在整个测试过程中,车辆速度应在20米/秒和22米/秒之间。测试应在一条进入弯道的直路上进行。在直道上,测试车辆应调整到靠近车道中间的位置,使其在方向盘角度为零的情况下直行并与车道平行。做完这些后,在进入弯道前,应将方向盘放开。进入弯道后,测试应持续LKAS_curve_time秒。测试应进行两次,一次是进入左曲线,一次是进入右曲线。如果在测试过程中,车辆轮胎的外缘没有超出车道边界超过LKAS_Offset_max,则一次测试成功。如果在一个右弯道和一个左弯道的两次测试都成功,则测试程序成功通过。
LKAS_curve_time = 5 s
LKAS_Offset_max = 0,4 m for light vehicles
重型车辆的LKAS_Offset_max = 1,1 m
曲线半径没有规定,在整个测试期间,曲线半径没有必要保持不变。在整个测试过程中,曲率变化率应是连续的,并且不应超过 LKAS_curvature_rate_max。测试道路的形状应使车辆在车道中间连续行驶时,横向加速度不超过1.0m/s2。至少在测试的最后一秒,测试道路的形状应该是,如果车辆在车道中间连续行驶,横向加速度将在0.5m/s2到1.0m/s2的范围内。
LKAS_curvature_rate_max = 4×10-5 1/m2

原文标题:ISO-11270-车道保持辅助系统LKA性能测试方法和流程


-
俄罗斯科技巨头Yandex暂停在美国测试自动驾驶2022-03-08
-
PreScan快速入门到精通第三十六讲:PreScan中使用车道线传感器2022-03-07
-
PreScan快速入门到精通第三十五讲:车道线识别传感器-ALMS车道线传感器2022-03-07
-
ISO-17361-车道偏离预警系统LDW测试方法和流程2022-03-07
-
车道偏离预警LDW介绍2022-03-07
-
西门子针对零部件供应商车辆系统集成指导2022-03-02
-
新疆首套交直流充电桩现场测试仪检定装置投用2022-03-02
-
三部门颁布《关于修改〈道路运输车辆动态监督管理办法〉的决定》2022-02-25
-
ISO 22737 预定轨迹低速自动驾驶系统-系统要求、性能要求和性能测试规范(中文全文版)2022-02-24
-
BMW下一代L3级自动驾驶车辆HMI设计方法2022-02-22
-
2022年上海市智能网联汽车行业市场现状及发展趋势分析 政策推动行业发展且测试成果初显【组图】2022-02-17
-
上海新能源小型货运车辆专用营运额度投放,纯电和燃料电池货车迎利好2022-02-17
-
全球最大规模!超千辆示范运营车辆助力北京冬奥会:氢燃料电池汽车迎来商业化拐点2022-02-12
-
李书福的汽车游戏:拿极氪来作为一次“用户压力测试”2022-02-10
-
车道模型验证示例2022-02-08