
五部门关于开展2024年新能源汽车下乡活动的通知
PreScan快速入门到精通第三十五讲:车道线识别传感器-ALMS车道线传感器
来源:新能源汽车网
时间:2022-03-07 14:01:04
热度:
PreScan快速入门到精通第三十五讲:车道线识别传感器-ALMS车道线传感器分析型车道标线传感器(ALMS)是车道标线传感器的一种新的实现方式,它提供了传感器所能看到的道路上的车
分析型车道标线传感器(ALMS)是车道标线传感器的一种新的实现方式,它提供了传感器所能看到的道路上的车道线信息。车道线信息以一组相对于传感器的多项式的形式提供。它可以在 "地面真相传感器 "部分找到。传感器的配置通过其 "配置 "选项卡完成。通过ALMS传感器可以实现道路车道线的识别,用于智能驾驶横向控制相关功能的算法开发与验证。

下表给出了与车道线传感器的比较。

35.1 功能说明
分析性车道线传感器(ALMS)是一种地面真相传感器,可报告传感器视野内的实际车道线。车道线由拟合到精确车道线的多项式组表示。多项式组由许多描述 X、Y 和 Z 的三项式组成,这些三项式是长度变量 L 的一个函数。
35.2 线路剪切和分割
传感器将只考虑传感器 FoV 内的车道线部分。多次穿过 FoV 的线将被视为单独的线。然而,在 Prescan 编辑器中设置的车道线标签将保留给检测到的线,并将显示在传感器的输出中(此处有关于车道标签的更多信息)。车道线的标签(可由用户调整)使其能够以一组多项式的形式获得出现在输出中的线条之间的关系。如下图所示为一个例子。默认情况下,下图曲线所示的两条车道线得到了相同的标签,这意味着传感器输出的所有线条(即多项式)都得到了相同的线条标签值。如果两条车道线被赋予两个不同的标签值,这些值也将被添加到多项式的输出中去
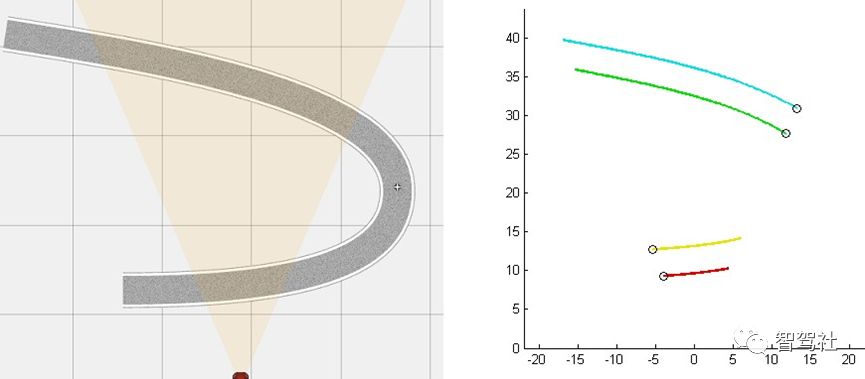
连续的道路(L)由于FoV剪裁而被分成两块,如传感器输出(R)所示。
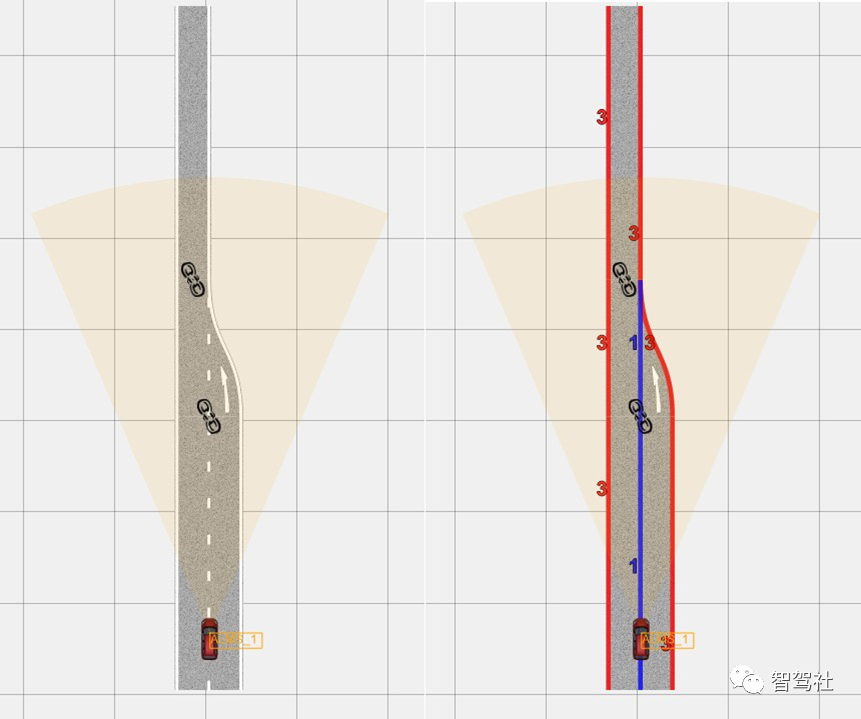
跨越多个路段的车道线将被视为一条线;不同路段上的车道线的部分,如果连接在一起,并且线标匹配,则合并成线。但是,如果两条或两条以上具有相同车道标签值的车道线相交,这些车道线将被分割成新的车道线,所有车道线都以交点为终点。下面介绍几个例子来说明这个问题。
在第一个例子中,有三条相连的路段,使用默认的标签,将所有外侧的路边线标签值为3,虚线中心线标签值为1。在这种情况下,就形成了三条线,一条与左边的红线对应的线,一条与右边的红线对应的线,一条与中间的蓝线对应的线。对这三条线分别确定一组拟合多项式。
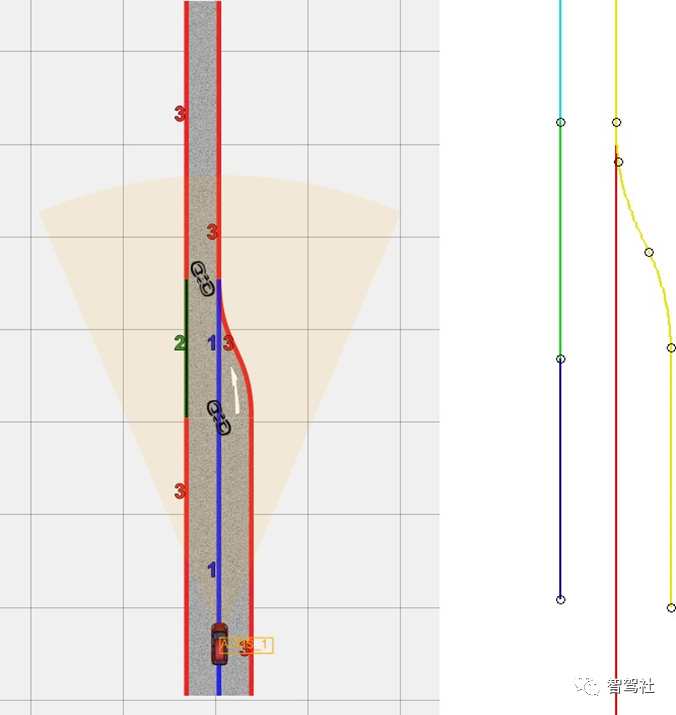
当改变中间路段左侧车道线的标签时(取值为2),左侧的车道线不再连接,三部分将被视为三条独立的线。在拟合阶段会发现有5组多项式,对应右图所示的5条彩线。
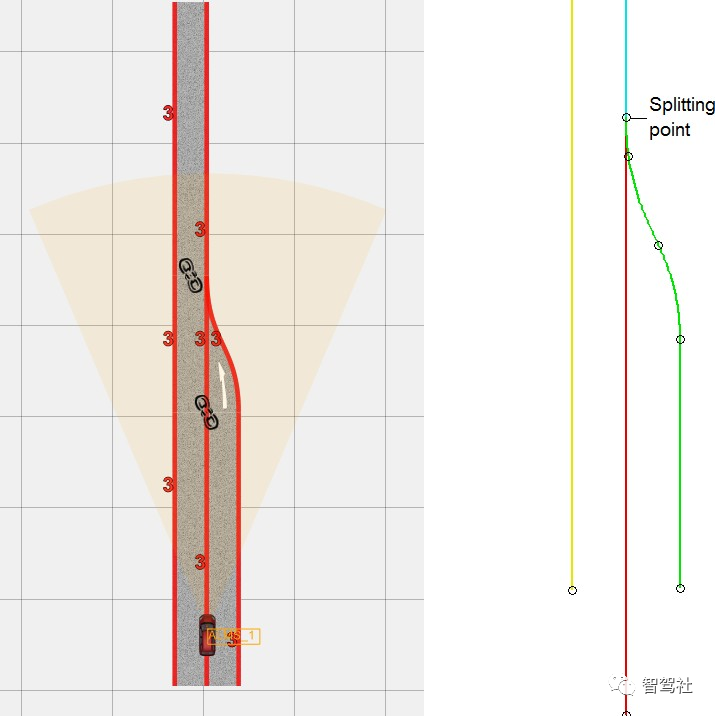
当所有车道线都得到相同的标签值时,如下图所示,中间车道线和右边车道线相交的地方会出现分叉。在这种情况下,相交的车道线被认为是三条独立的线,导致4组多项式,它们对应于右图所示的4条彩线。
对于在 FoV 内检测到的每条车道线,传感器的拟合算法将尝试在整个车道线长度上拟合一组多项式(X、Y 和 Z 的一项多项式)。计算拟合多项式与原始线之间的最大误差,如果该误差超过用户设置的误差范围,则缩短用于拟合的区间长度,直到拟合误差低于阈值。然后用同样的方法对其余的线进行拟合,得到第二组多项式。根据要拟合的线的性质和误差范围的大小,可以用一个、两个或几个多项式组来描述一条线。
3 首页 下一页 上一页 尾页

-
ISO-17361-车道偏离预警系统LDW测试方法和流程2022-03-07
-
车道偏离预警LDW介绍2022-03-07
-
一氧化碳传感器在电动汽车及储能电站中的应用2022-03-04
-
PreScan快速入门到精通第三十四讲:基于PreScan进行超声波雷达传感器仿真2022-03-02
-
自动驾驶和环境感知传感器的数字孪生技术和应用2022-03-02
-
自动驾驶的未来,多传感器融合方案分析2022-02-28
-
基于MATLAB&SIMULINK开发自动驾驶系统第三讲之鸟瞰范围内可视化传感器数据和物体跟踪2022-02-22
-
基于MATLAB&SIMULINK开发自动驾驶系统第一讲之传感器配置和坐标系转换2022-02-22
-
基于MATLAB&SIMULINK开发自动驾驶系统第二讲之地面真值标签与验证2022-02-22
-
打造全新中端新能源品牌,奇瑞能摆脱“低端廉价”的标签?2022-02-15
-
车道模型验证示例2022-02-08
-
燃料电池车厂商可以采用哪些氢气传感器监测氢气泄漏?2022-01-25
-
新能源重卡销量猛增668%!新能源商用车驶入发展快车道2022-01-13
-
浅析自动驾驶:车道偏移预警2022-01-04
-
霍尔传感器和电流纹波技术在电动车窗防夹中的应用2021-12-24