
五部门关于开展2024年新能源汽车下乡活动的通知
基于MATLAB&SIMULINK开发自动驾驶系统第五讲之扩展卡尔曼滤波
来源:新能源汽车网
时间:2022-02-22 12:01:59
热度:
基于MATLAB&SIMULINK开发自动驾驶系统第五讲之扩展卡尔曼滤波当物体运动遵循非线性状态方程或测量值是状态的非线性函数时,使用扩展卡尔曼滤波器。一个简单的例子是,当物体的状
当物体运动遵循非线性状态方程或测量值是状态的非线性函数时,使用扩展卡尔曼滤波器。一个简单的例子是,当物体的状态或测量值是以球面坐标计算的,如方位角、海拔和范围。
5.1状态更新模型
扩展的卡尔曼滤波公式将状态方程线性化。更新后的状态和协方差矩阵仍然是之前状态和协方差矩阵的线性函数。然而,线性卡尔曼滤波器中的状态转换矩阵被状态方程的雅各布矩阵所取代。 雅各布矩阵不是恒定的,而是可以取决于状态本身和时间。要使用扩展卡尔曼滤波器,必须同时指定状态转换函数和状态转换函数的Jacobian。
假设有一个预测状态的闭式表达式,作为之前状态、控制、噪声和时间的函数:

预测状态相对于前一状态的Jacobian为:
预测状态相对于噪声的Jacobian为:
当噪声线性地进入状态更新方程时,这些函数采取更简单的形式。

在此状态下,
.
5.2 测量模型
在扩展卡尔曼滤波器中,测量可以是状态和测量噪声的非线性函数。

相对于状态的测量的雅各布值为
相对于测量噪声,测量的雅各布值为
当噪声以线性方式进入测量方程时,这些函数采取更简单的形式。

此时 ,

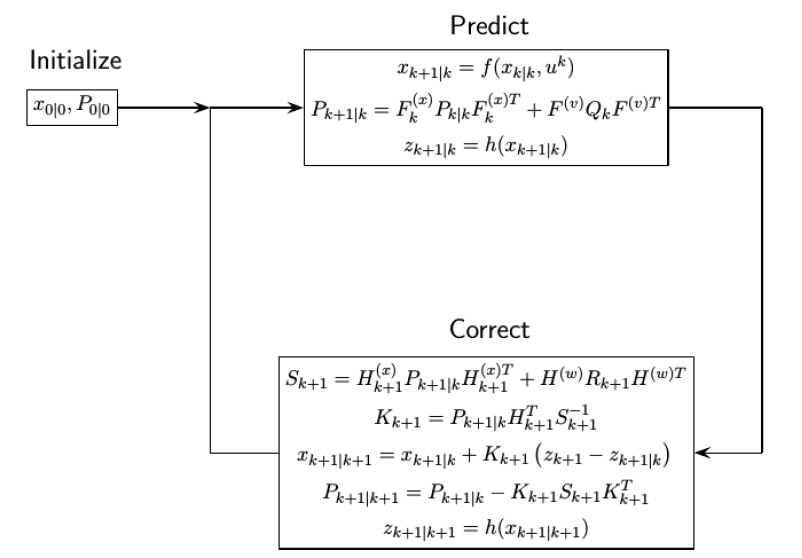
5.3 扩展卡尔曼滤波环路
这种扩展卡尔曼滤波环路与线性卡尔曼滤波环路几乎相同,只是。
- 尽可能使用精确的非线性状态更新和测量函数状态转换矩阵被状态雅各布取代
- 测量矩阵由相应的雅各布代替。
5.4 预定义的扩展卡尔曼滤波函数
自动驾驶工具箱提供了预定义的状态更新和测量功能,用于扩展卡尔曼滤波器。
运动模型
函数名字
函数目的
Constant velocity
constvel
恒速状态更新模型
constveljac
恒速状态更新雅各布函数
cvmeas
恒速测量模型
cvmeasjac
定速测量Jacobian函数
Constant acceleration
constacc
恒加速状态更新模型
constaccjac
恒加速状态更新雅各布函数
cameas
恒加速度测量模型
cameasjac
恒定加速度测量Jacobian函数
Constant turn rate
constturn
恒定转率状态更新模型
constturnjac
恒定转速状态更新雅各布函数
ctmeas
恒定转速测量模型
ctmeasjac
恒速测量雅各布函数
trackingKF 函数实例:
创建一个二维追踪EKF对象,并使用名-值对来定义StateTransitionJacobianFcn和MeasurementJacobianFcn属性。使用预定义的恒速运动和测量模型以及它们的雅各布系数。
EKF = trackingEKF(@constvel,@cvmeas,[0;0;0;0], ...
'StateTransitionJacobianFcn',@constveljac, ...
'MeasurementJacobianFcn',@cvmeasjac);
运行过滤器。使用预测和纠正函数来传播状态。你可以按任何顺序调用预测和纠正,次数不限。在笛卡尔坐标中指定测量。
measurement = [1;1;0];
[xpred, Ppred] = predict(EKF);
[xcorr, Pcorr] = correct(EKF,measurement);
[xpred, Ppred] = predict(EKF);
[xpred, Ppred] = predict(EKF)
xpred = 4×1
1.2500
0.2500
1.2500
0.2500
Ppred = 4×4
11.7500 4.7500 0 0
4.7500 3.7500 0 0
0 0 11.7500 4.7500
0 0 4.7500 3.7500
原文标题:基于MATLAB&SIMUlink开发自动驾驶系统第五讲之扩展卡尔曼滤波


-
氧化锆传感器测量汽车排放物中所含氧气浓度的应用解决方案2021-12-24
-
更接近量产状态 恒驰5量产版申报信息曝光2021-11-10
-
补齐动力短板,五菱凯捷还能回到月销过万的状态吗?2021-08-16
-
避免涉水风险!华为自动驾驶积水深度测量专利曝光2021-07-26
-
魅族公开驾驶状态检测专利,可在发生事故时为救援工作提供便利2021-07-19
-
魅族公开驾驶状态检测相关专利,可为事故救援工作提供便利2021-07-19
-
赛麟汽车“闹剧”不断,陷入停摆状态!2021-06-21
-
华为公开“电池健康状态的估算方法”专利2021-05-11
-
智能汽车安全问题是一个多态并存的状态2021-03-16
-
北京市指标办:小客车指标申请者须确保相关证件为有效状态2021-03-07
-
北京新能源指标申请多次变更操作以截止日状态为准2021-02-25
-
解析岚图FREE三电技术状态,四缸增程器俘获消费者2020-12-19
-
《甲醇燃料汽车非常规污染物排放测量方法》正式发布实施2020-11-25
-
电动汽车电池管理系统的测量优化方案2020-09-30
-
审核状态变更,吉利距离“科创板整车第一股”更近了一步2020-09-08