
五部门关于开展2024年新能源汽车下乡活动的通知
百度Apollo7.0 规划算法框架解析
来源:新能源汽车网
时间:2022-02-07 14:00:54
热度:630
百度Apollo7.0 规划算法框架解析本文来源:智车科技/ 导读 /本篇文章想和大家分享一下Apollo7.0最新的规划算法。由于Apollo的planning整体代码都相当庞大
本文来源:智车科技
/ 导读 /
本篇文章想和大家分享一下Apollo7.0最新的规划算法。由于Apollo的planning整体代码都相当庞大,一开始还是理清其框架,再分算法块逐个击破这样效果更好。
这篇文章希望能带领读者理清planning的整体框架,梳理数据流,以主要场景为例,一直分析到task (apollo planning 的主要算法所在处)逻辑前的准备工作、输入如何构造的,之后再深入看task内部的细节也更容易理解。
特别注意,本文中的流程图均为作者花费了大量时间梳理而来,以便读者能够更易理解planning的整体框架,抓住重点不被细节带跑偏。
1
planning 的输入输出
读懂一个模块,首先必然是了解其的上下游,即输入输出是什么。熟悉Apollo CyberRT框架的小伙伴都知道在该框架下,输入输出由Reader和Writer构成,并定义在每个模块的component文件中。除此之外,CyberRT框架定义了两种模式,分别为消息触发和时间触发,而planning中采用的为消息触发,因此必须接到特定的上游消息后,才会进入内部主逻辑,而消息触发的上游消息,定义为component中Process()函数的入参。

因此总结来看,planning的上下游关系总结为下图:
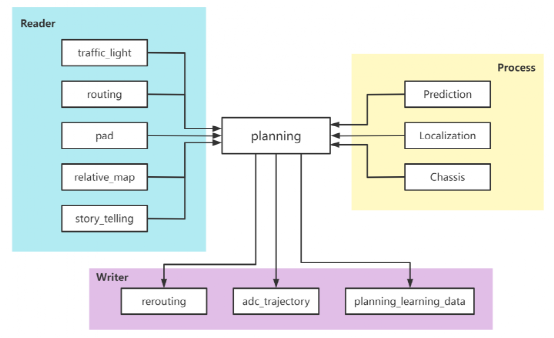
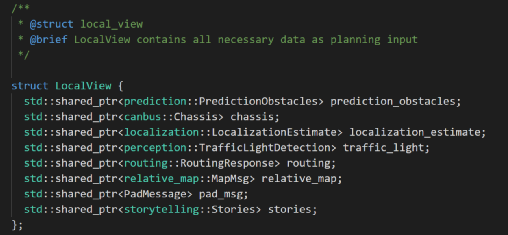
这里再重复一下,planning的输入分为Reader和Process()入参的原因在于,planning依赖于Process()的三个上游输入,只有同时接到这三个输入,才会触发planning的主逻辑,即是planning正常启动的必要条件。而Reader则不是,其中部分上游还依赖于配置参数是否打开,具体可以查看Apollo的源码。planning的输出就比较简单了,主要是给控制的ADCTrajectory数据,包含了一条带时间、速度的轨迹点集,具体的格式定义可以查看对应的proto文件。
2
planning 整体框架
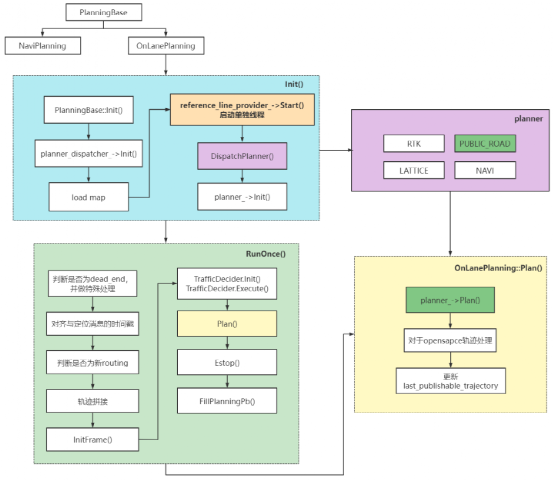
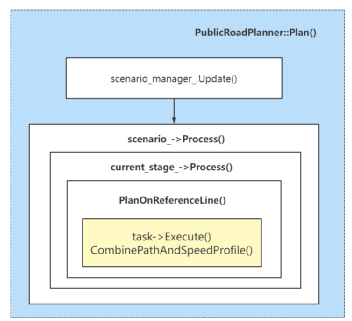
上面两张流程图是我整理的Apollo规划算法的框架,整体框架和之前并无太大变化。主框架分为两个线程,子线程ReferenceLineProvider以20HZ的频率运行,用于计算planning中最重要的数据结构reference_line;主线程上还是基于场景划分的思路,多数场景下还是采用基于ReferenceLine的规划算法,对于泊车相关场景,则利用open space算法。目前Apollo的场景划分为了16种,在proto文件中可以查看到。在Apollo 7.0中,新增了deadend_turnaround场景,用于无人车遇到断头路时,采用openspace的方法进行调头的轨迹规划,后续我会详细看一下里面的算法实现细节。



-
美的、格力、创维等家电巨头们造车:技术向左,场景向右2022-01-24
-
比亚迪估值“市梦率”?回调原因及投资逻辑何在2022-01-21
-
商业化落地后,自动驾驶载人场景商业价值更高?2022-01-18
-
悠跑如何重新定义汽车研发的顶层逻辑、技术形态和供应链?2022-01-13
-
自动驾驶五大主流场景简析2022-01-04
-
华为如何打造出行场景的“超级终端”?2021-12-30
-
无人配送车辆年终盘点,场景驱动或成新趋势,美团有望成为中国的NURO2021-12-23
-
自动驾驶八大应用场景全景扫描,谁能抓住万亿市值赛道?2021-12-17
-
自动驾驶安全框架开发进展汇总介绍2021-12-16
-
自动驾驶环卫场景掀起资本新浪潮!谁来分食2000亿大蛋糕?2021-12-14
-
自动驾驶典型应用场景都有哪些?2021-12-14
-
比亚迪海豚实现销量三连涨的背后逻辑2021-12-13
-
造车逻辑变50%?宝马汽车对未来电动车在如何思考2021-12-06
-
重塑新能源物流车生态,全路程如何让换电在物流场景落地?2021-12-02
-
宁德时代与深势科技达成合作 共建联合实验室推动先进算法在新能源领域的应用2021-11-30