
五部门关于开展2024年新能源汽车下乡活动的通知
从小鹏P7看自动驾驶组合定位中的IMU
来源:新能源汽车网
时间:2020-05-14 12:04:47
热度:
从小鹏P7看自动驾驶组合定位中的IMU自小鹏P7发布以来,业内对这款“神车“的自动驾驶技术方案的猜测和讨论非常热闹。P7其中一项的卖点,是高精度定位组合(RTK+IMU+高精度地图
自小鹏P7发布以来,业内对这款“神车“的自动驾驶技术方案的猜测和讨论非常热闹。P7其中一项的卖点,是高精度定位组合(RTK+IMU+高精度地图),并且明确高精度定位的相对定位精度<0.3%。P7都能给出让人满意的米级甚至亚米级位置,并以此作为自动驾驶系统的基础。高精度航位推算离不开IMU,下面我看看要达到0.3%的相对定位精度,需要什么样性能的IMU。

自小鹏P7发布以来,业内对这款“神车“的自动驾驶技术方案的猜测和讨论非常热闹。P7其中一项的卖点,是高精度定位组合(RTK+IMU+高精度地图),并且明确高精度定位的相对定位精度<0.3%。这意味着在大家苦恼的导航失灵位置(市中心区、立交高架、长隧道、高层小区、园区和地库等),P7都能给出让人满意的米级甚至亚米级位置,并以此作为自动驾驶系统的基础。高精度航位推算离不开IMU,下面我看看要达到0.3%的相对定位精度,需要什么样性能的IMU。
小鹏汽车并没有给出0.3%的误差概率分布,根据PL>95%(PL,Protection Level),本文估计至少是2σ分布,如果定位误差服从无偏高斯分布,也就是1σ是0.15%。

由于惯性导航是一本大部头的书,组合导航又是另一本大部头的书,本文根据汽车运动的特点,对估算的前提条件进行简化,目的是给出简明、定性而非定量的结果。
本文先对水平面行驶做一下定性估计,然后再分析其他因素的影响。
一. 假设和约束
下面的假设条件被用于水平面驾驶的估计:
(1) 航位推算系统由IMU和轮速传感器组成;
(2) 汽车行驶较为平稳,轮速没有打滑,汽车没有漂移或者侧滑;
(3) 在开始航位推算前,卡尔曼滤波器对可辨识状态的估计已经稳定;
(4) 汽车水平运动,路面没有坡度和倾侧;
(5) 暂时忽略姿态误差对IMU测量值投影的影响;
(6) 暂时忽略交叉轴耦合、振中零偏、g敏感;
(7) 暂时忽略加速度的标度误差;
(8) 暂时忽略地球自转的影响。
约束条件:
(1) 车身的横向速度为零 ;
(2) 车身的垂向速度为零
二. 平面行驶的误差运动学
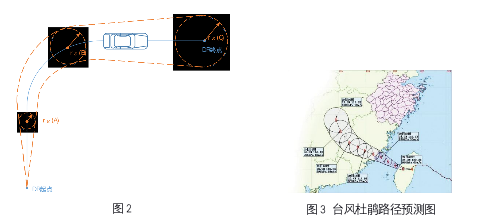
图2是用惯导推算位置的误差示意图,其中蓝色的实线表示行驶轨迹的计算值,橙色包络表示各时刻某σ下(如2σ或1σ)误差圆的半径合集。类似图3中台风路径预测图,预测的偏差会随着时间和里程增加而增大。
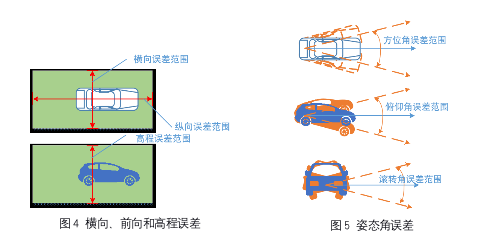
图4把位置误差分解成纵向误差(x)、横向误差(y)和高程误差(z)。务必注意这些误差并非固定的关系,例如车身转了90°的弯后,纵向误差和横向误差将相互调换。图5把姿态误差分解成航向(z)、滚转(x)、俯仰(y)三个角度的误差。
3 首页 下一页 上一页 尾页

-
Swift合作德国电信为自动驾驶提供精确到10厘米以下的定位技术2020-03-04
-
现代、法雷奥与Hexagon合推高精度车辆定位系统,提升道路安全性2020-01-15
-
丰田重大组织架构调整 中国市场定位再升级2019-12-06
-
新能源汽车属性定位决定充电还是换电2019-09-09
-
千寻位置宋子未:开启自动驾驶“上帝之眼”,GNSS高精度定位的突破2019-08-13
-
自主品牌如何提高新能源产品定位?2019-08-06
-
蔚来资本向近30家公司投资近40亿元 仍定位新能源领域的尖端技术2019-07-25
-
千寻位置推高精定位一体化方案2019-06-11
-
千寻位置与一汽红旗达成合作,高精度定位助力V2X与自动驾驶2019-05-28
-
Vishay推出的新款高精度电池分流器改进RTC性能2019-05-21
-
蔚来:从定位高端回到人间2019-04-04
-
GE11定位最强A级纯电轿车,吉利新能源的故事欲翻篇2019-03-06
-
全球战略定位车型诞生 GE11肩负吉利新能源品牌上向重任2019-03-05
-
【电动汽车百人会】国务院发展研究中心资源与环境研究所所长高世楫:能源转型背景下汽车产业的定位2019-01-14
-
氢燃料电池汽车应用的主攻方向及市场定位研究2018-08-09