
五部门关于开展2024年新能源汽车下乡活动的通知
使用锂离子技术实现电池充电器
来源:新能源汽车网
时间:2016-06-15 08:11:26
热度:
使用锂离子技术实现电池充电器 本文中,我们将举例说明如何使用锂离子技术来实现电池充电器。锂离子电池充电器通常采用恒流(CC) - 恒压(CV)充电曲线。充电过程会经历几个不同的阶
本文中,我们将举例说明如何使用锂离子技术来实现电池充电器。锂离子电池充电器通常采用恒流(CC) - 恒压(CV)充电曲线。充电过程会经历几个不同的阶段,在确保电池容量充满的同时要符合特定的安全规则。CC-CV曲线包括以下几个阶段:
1. 预充
2. 激活
3. 恒流
4. 恒压
充电开始为预充阶段,以检查电池状况是否良好。在此阶段中,通常给电池提供电池容量5%到15%的少量电流,如果电池电压上升到2.8V以上,则认为电池状况良好,可以进入到激活阶段。在此阶段中,给电池提供相同的电流,但会持续更长的时间。当电池电压上升到3V以上,则启动快充,并提供等于或低于电池容量的恒定电流。当电池电压上升到完全充电电压(4.2V) 时或出现超时情况(不管哪一种情况先出现),恒流阶段结束。电池电压到达完全充电电压时,充电进入到恒压阶段,且电池电压保持恒定。要做到这一点,充电电流必须随着时间的推移而降低。这一阶段的充电过程相比于其它充电阶段而言所需的时间最长。在这个过程中,当充电电流降到"结束电流"限度以下,通常为电池容量的2%,则电池充满,充电过程结束。请注意,充电过程中每个阶段都有一个时间限制,这是一个重要的安全特性。
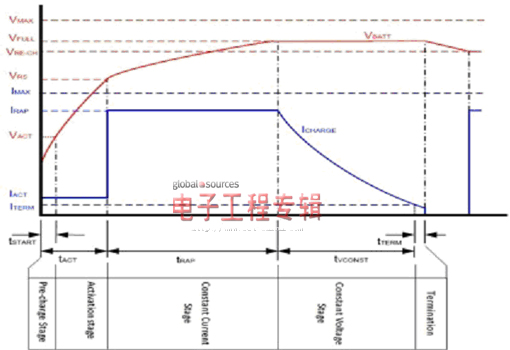
图1:锂离子电池充电曲线
为了实施这一充电曲线,必须随时了解电池电压和充电电流。此外,还要检查电池的温度。因为在充电时,电池往往会变热。如果温度超过电池的规定限额,就可能对电池造成损害。
就电池充电器的实现方案而言,用户可有两个选择。一是采用专门的电池充电器IC,二是采用更加通用的微控制器。第一种方案能快速解决问题,但其可配置性和用户界面选项(LED指示灯)有限。第二种方案采用微控制器,设计的时间会稍微长一些,但能提供可配置性选项,并且还能集成其它功能,如电池充电状态(SOC)计算以及通过通讯接口向系统中的主机处理器发送信息等。此外,微控制器不能提供充电器所必需的电源电路系统,而且还需要外部BJT或MOSFET.不过这些电源组件的成本相比于微控制器或专门的充电器IC 而言要低得多。
充电器架构
我们从充电曲线可以看出,单节锂离子电池充电器需要可控的电流源。电流源输出应当根据电池状态而改变。考虑到上述要求,基于微控制器的实施方案需要以下功能模块:
1. 电流控制电路
2. 电池参数(电压、电流、温度)测量电路
3. 充电算法(用于实现CC-CV充电曲线)
方案框图如下所示:
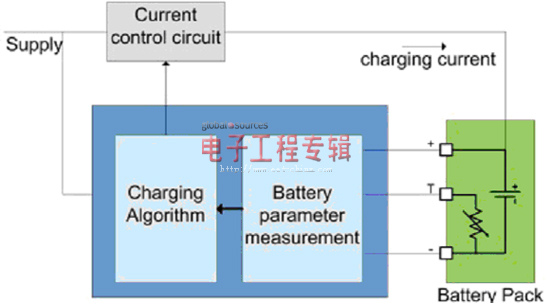
图2:锂离子电池充电器框图
电流控制电路可采用电压源和电流反馈技术进行构建。其工作原理类似于典型的负反馈控制系统。允许充电电流通过小电阻以获得反馈,从而产生一定的电压。
电压源可采用两种方法进行创建:
1. 线性拓扑结构
2. 开关:降压或升压拓扑结构
线性拓扑结构采用线性模式的串联导通元件(BJT或MOSFET),如图3所示。
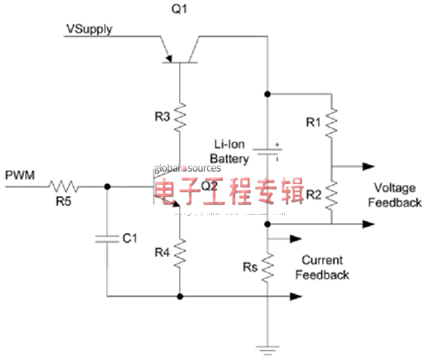
图3:线性拓扑结构
通过控制串联导通晶体管Q1的偏置实现对充电电流的控制。可使用数模转换器(ADC)或脉宽调制器(PWM)配合外部RC低通滤波器来控制偏置。线性方法适用于充电电流(<1A)较低的情况,因为串联导通元件会面临功率消耗问题。
开关拓扑结构本身具有低功耗的优势,能实现较高的充电电流。基于开关降压调节器的充电器如图4所示。
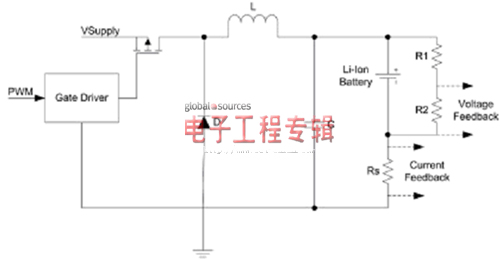
图4:开关降压调节器拓扑结构
充电电流由驱动MOSFET的PWM占空比而设定。
电池参数测量电路:反馈信号需要使用ADC进行测量,目前大多数微控制器均可提供ADC外设。在图3和图4中,我们看到了如何获取电池电压和电流反馈。然而,这些差分信号需要差分ADC进行测量,而通常在微控制器中采用的是单端ADC.图4和图5所示的电路通过让微控制器接地和电源接地不同,可方便地加以修改,从而为电压、电流和温度等所有3个参数生成单端信号。
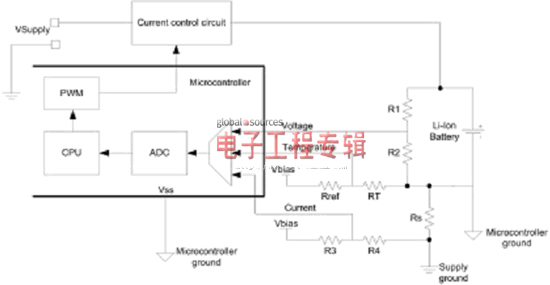
图5:采用单端ADC进行测量
电池负端可作为微控制器接地,这就让电压、温度和电流反馈可参考微控制器接地,并能进行单端ADC测量。对于电流反馈而言,正偏移电压需要引入,而反馈电压在电池充电时将为负。如图5所示,电阻R3和R4提供了所需的偏移电压。
充电算法:这一行为将结束环路。CPU读取ADC以获取电压、充电电流和温度读数,并根据充电曲线控制PWM占空比。CPU监控ADC结果与控制PWM的速度取决于环路响应时间和CPU带宽消耗二者之间如何平衡。
ADC参数和PWM分辨率:ADC分辨率和精确度以及PWM分辨率是在设计电池充电器时应考虑到的重要参数。ADC分辨率定义了输入电压测量的精度(这里是指反馈电压)。PWM分辨率则定义了改变输出信号占空比的精度,这进而又决定了电流控制电路的输出电压。锂离子电池充电时,电池电压需要实现准确和高精度的控制。当电池电压接近充满状态时,这一点就显得尤为重要。可控性取决于ADC分辨率、测量的准确度以及占空比变化的细粒度。
图5给出了采用赛普拉斯CY8C24x23 PSoC器件实施的充电器架构示例。微控制器与通用数字和模拟模块配合使用,可配置为特定的电路功能。举例来说,持续时间模拟模块可用来实施可编程增益放大器和比较器。开关电容模拟模块则有多种不同用途,包括滤波器、数模转换器(DAC)和模数转换器(ADC) 等。数字基础模块可用来实施PWM、计数器、定时器和缓冲器,而数字通讯模块则可用来实施SPI、UART、IrDA RX和TX等通信接口。此外,该器件还可提供I2C模块,可用作为主设备或从设备。
图6所示为单节电池充电器应用的器件资源消耗情况,我们看到还有足够的数字和模拟模块能够实施其它有用的功能,这就为系统提供了更多的集成选项,从而有助于降低系统成本和大小。
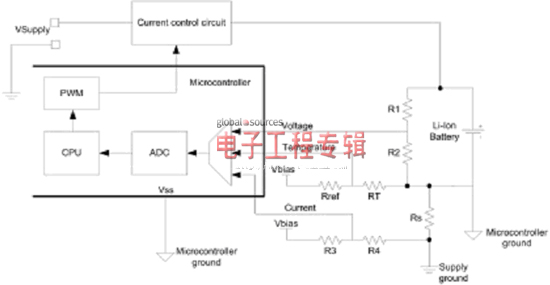
图6:采用PSoC 1 (CY8C24x23)的实施方案


-
燃料电池汽车关键技术2023-11-30
-
国家燃气汽车工程技术研究中心获批国家科技服务业试点2023-11-30
-
混合动力汽车的六大关键技术2023-11-30
-
梯级利用存难题 动力电池技术困点待解2016-06-17
-
【聚焦】动力电池技术四大争“辩”与“变”2016-06-16
-
PSA打造新一代电池技术 新能源汽车争夺战升级2016-06-15
-
日本储备动力电池技术:目标1000Wh/Kg2016-06-15
-
TI推出支持自动USB检测功能的线性电池充电器2016-06-15
-
延长锂离子电池使用寿命的最新电源解决方案2016-06-15
-
提高便携式设备锂离子电池的充电效率2016-06-15
-
Diodes推出锂离子/聚合物电池充电器适用于需要USB和AC/DC电源适配器2016-06-15
-
如何选择动力型锂离子电池的正极材料2016-06-15
-
绿色社会的关键在于半导体电路和系统级别优化:锂离子电池2016-06-15
-
正确选择与应用好便携式电子设备中电池技术2016-06-15
-
功率跟踪电池充电器—LTM80622016-06-15