
五部门关于开展2024年新能源汽车下乡活动的通知
基于CAN 总线的电动机保护器的研究
来源:新能源汽车网
时间:2016-06-13 19:13:53
热度:
基于CAN 总线的电动机保护器的研究 摘要:本文简要描述了电动机故障分析中的对称分量法和CAN总线的结构特点。在分析算法的基础上,结合CAN总线通信的要求,提出基于CAN总线的电
摘要:本文简要描述了电动机故障分析中的对称分量法和CAN总线的结构特点。在分析算法的基础上,结合CAN总线通信的要求,提出基于CAN总线的电动机保护的方案,并介绍了设计方案的硬件结构和程序流程图。实验结果以及在工厂生产车间的实际运行情况表明,该设计功能合理、可靠高效,达到了预期的效果。
1 引言
电动机是现代工农业生产的主要动力,而异步电动机由于结构简单、成本低、机械性能满足大多数生产机械的要求,因此应用范围更加广泛。但异步电动机经常在高温、高湿、多尘埃的环境中工作,容易发生堵转、短路、断相等故障,因此,设计设计性能优越的保护装置,对于电动机的安全使用具有很重要的意义。
目前,异步电动机保护主要采取热继电器型的过流保护,这种保护灵敏度低,切除故障时间长,往往在保护动作后电动机已经损坏。随着单片机技术、通信技术的发展,以及智能化电动机保护技术研究的深入,促使电动机保护器朝着通信网络化、保护装置微机化、保护功能集成化等方面发展。
2 电动机常见故障分析以及保护措施
电动机故障按对称与否分为对称故障和不对称故障两种。对称故障有过载、堵转、三相短路等,这类故障对电动机的影响主要是电流增大而引起热效应;不对称故障又分为接地和不接地两类,非接地故障包括断相、逆相、相间短路,接地故障包括单相接地和二相接地。对称分量法是分析电动机不对称分量的常用方法。一组不对称的三分量可以分解为正序、负序、和零序三组对称的三分量,各序分量各自单独存在。电动机发生不对称故障时,将不对称三相电压和不对称三相电流分别用它们的三相分量代替,从而相应地形成正序、负序和零序三个等值网络,然后进行故障分析。假设己知不对称三相电流为IA,IB,IC ,电流的正序、负序和零序分量各为A1 A2 A0 I ,I ,I (以A 相为例),根据对称分量法,有式(1)或者式(2)所示的关系(因对称关系,相序量只写出A 相)。
对于电动机的不对称故障问题,如断相、相间短路、单相接地、两相接地短路等,借助于对称分量法分析比较简单,即任意一组不对称正弦量分解为三个平衡分量(正序分量/负序分量和零序分量),然后把各个分量对电动机所产生的影响分别计算,再把所得的结果叠加。

发生不对称故障时,电动机电流可分解为正序、负序和零序分量。当电动机三相对称时,负序和零序电流为零,而发生不对称故障时则会显著增加,因此在检测电动机过流程度的同时,以序分量为基础,检测负序和零序电流的大小。这样不但能更好地反应电动机的运行状况,还可以大大提高保护动作的灵敏度和可靠性。
3 CAN 总线简介以及节点组成
控制局域网络 CAN 是一种串行通信协议,能有效地支持具有很高安全等级的分布式实时控制。它由物理层和数据链路层两部分组成,而数据链路层又包括逻辑链路控制子层和介质访问控制子层。CAN 总线的应用范围很广,从高速的局域网络到低价位的多路配线都可以使用CAN 总线。CAN 总线型结构是一种适合工业现场自动控制的计算机局域网络。在网络的层次结构中,数据链路层和物理层是保证通信质量不可缺少的部分,CAN 控制器就用来完成这个任务,对外CAN 控制器提供了与微处理器的物理线路的接口,通过对它的编程,CPU 可以设置不同的工作方式,控制它的工作状态,进行数据的发送和接收,并把应用层建立在它的基础之上。CAN 总线高速发送接收器,又称总线驱动器,提供了CAN控制器与物理总线之间的接口,以及对CAN 总线的差动发送和接收功能。
4 硬件设计
该保护器的硬件电路主要有四部分:保护单元、通信单元、人机接口单元和主监控通信单元。硬件设计原理图如图1 所示:

保护单元由数据采集与转换模块和与控制微处理器组成。前者包括电压互感器、电流互感器(采用三相电压和各个电流信号)、低通滤波电路、电压偏置电路和电压跟随器等电路,本单元可以实现模数转换、报警、显示以及设置等功能。
通信单元是由一块双RAM 芯片负责保护单元与通信单元之间的数据连通。微处理器P87C52X2 将通信单元的核心,一方面保证与保护单元的数据通讯,另一方面负责处理与CAN 总线的通信。CAN 控制器采用SJA1000,CAN 驱动器采用TJA1050,这两个器件负责完成保护单元与CAN 总线的物理连接和数据传送工作。
主监控单元是电动机智能保护系统的核心,它接收来自现场保护控制单元传来的电动机状态和控制信息,同时根据需要向现场控制单元发出指令。它由一块RS232-CAN 适配器和上位机PC 组成,RS232-CAN 适配器是基于串行通信协议的适配器,负责上位机与CAN总线的通信。人机接口单元通过串行接口与保护单元连接,它包括看门狗模块、定时时钟模块、键盘输入模块、液晶显示模块、指示灯与复位按钮等。
5 算法介绍及软件设计
在算法上,要综合考虑计算精度和计算速度。根据研究情况和经验,本文采用周期函数的傅立叶算法。傅立叶算法用于提取基波分量或者提取某次谐波分量(例如二次谐波、三次谐波)非常方便。当采样频率为300hz 时,傅立叶算法的计算也很方便,用汇编语言编程也容易实现。另外,全波傅立叶算法所用的数据窗为一个周期;如果要提高微机保护的动作速度,也可以采用半波傅立叶算法。
主程序主要是用来实现通信协议中的各项功能。微处理器通过外部中断来响应CAN 总线通信。键盘显示扫描的周期为1ms.并在主程序循环中不断的查询各类标志,如查询到某个标志置位则转入相应的程序处理。主程序流程图如图2 所示:
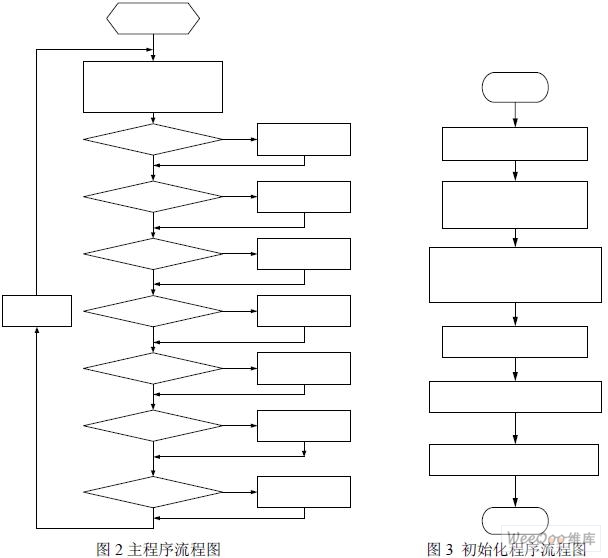
将CAN 总线技术引入到电动机的保护中,就是为了让其组成网络,实现主监控单元对各个分散的保护单元的在线实时监控,因此保护节点通信设计就关系到整个保护系统的可靠性和实用性。通信程序由三部分组成,分别是CAN 节点初始化程序,报文接收程序,报文发送程序。
SJA1000 的初始化只有在复位模式下才能进行,初始化主要包括工作方式的设置、接受滤波方式的设置、接受屏蔽寄存器和接受代码寄存器的设置、波特率参数的设置和中断允许寄存器的设置等等。在完成SJA1000 的初始化设置后,SJA1000 就可以回到工作状态,进行通信任务。初始化流程图如上图3 所示。
发送子程序负责节点报文的发送。发送时只需要将待发送的数据按待定格式组合成一帧报文,送入SJA1000 发送缓存区中,并置位命令寄存器中的发送请求位标志,然后启动SJA1000 发送即可。发送子程序报文发送分数据帧和远程帧两种。远程帧无数据场。报文发送有两种模式,即中断和查询。考虑到通信实时性的要求,本文采用中断模式。发送子程序流程图如图4 所示。

接收子程序负责节点报文的接收,并且要对诸如总线关闭、错误报警、接收溢出等情况进行处理。和发送子程序一样,也有中断和查询两种方式,本文采用中断方式。接收子程序流程图如图5 所示。
6 创新点及结束语
本文提出将 CAN 总线技术应用到电动机保护中,使其组成网络,实现了智能保护各节点之间、节点与上位机之间的通讯。本设计对于电动机的各种故障有良好的保护效果,在实验室环境下仿真结果良好,在某钢铁厂生产车间的实际应用中也取得了令人满意的效果,达到预期目标。
参考文献:
[1]. P87C52X2 datasheet http://www.dzsc.com/datasheet/P87C52X2+_936305.html.
[2]. TJA1050 datasheet http://www.dzsc.com/datasheet/TJA1050_649182.html.
[3]. RS232 datasheet http://www.dzsc.com/datasheet/RS232_585128.html.
[4]. PC datasheet http://www.dzsc.com/datasheet/PC+_2043275.html.
[5]. SJA1000 datasheet http://www.dzsc.com/datasheet/SJA1000+_609075.html.
来源:过往烟云


-
常州纯电动汽车:重大利好 高速电动出行2023-11-30
-
插电混动和纯电动汽车孰好孰坏2023-11-30
-
PLC控制的防电源短路的电动机正反转控制线路2016-06-13
-
无刷直流电动机功率驱动电路设计2016-06-13
-
无传感器交流电动机控制技术提高了运行效率2016-06-13
-
基于DSP无刷电动机控制系统设计2016-06-13
-
基地式CAN总线电动执行器设计2016-06-13
-
数控直流电动机伺服控制系统的研究2016-06-13
-
基于FPGA的电动机微机保护实现方法2016-06-13
-
基于PLC的异步电动机综合控制系统设计2016-06-13
-
三相电动机编程控制工作原理及方案2016-06-13
-
一种基于小功率高温无刷直流电动机驱动器设计2016-06-13
-
浅析PLC控制交流电动机在恒水位系统中的应用2016-06-13
-
交流伺服电动机中的滤波器2016-06-13
-
实现无传感器、无电刷的电动机控制设计2016-06-13