
五部门关于开展2024年新能源汽车下乡活动的通知
基于CAN总线的电动汽车动力电池组采集系统设计
来源:新能源汽车网
时间:2016-06-13 19:10:58
热度:
基于CAN总线的电动汽车动力电池组采集系统设计 电池是电动汽车的能量来源,电动车发展的主要技术瓶颈就是电池技术的发展。目前全世界汽车厂商纷纷开发使用电动车,电动车的蓬勃发展及远大
电池是电动汽车的能量来源,电动车发展的主要技术瓶颈就是电池技术的发展。目前全世界汽车厂商纷纷开发使用电动车,电动车的蓬勃发展及远大前景,促使了电池技术的发展,国内外各大电池厂商投巨资来发展电池技术。而对电池性能的研究就离不开大量的实验数据,动态采集电动车电池组的参数是研究电池性能的重要途径。本系统对电池组的动态工作过程的参数变化进行实时采集并存储分析。通过建立电池模型来预测电池的容量状态与电池健康状态,建立电池组的基础数据库,为研究电池性能提供可靠的数据参考。
1 基于CAN 总线的系统硬件设计
CAN 总线是目前世界上最流行的汽车控制与测试间的一种串行数据通信协议,具有实时性强、抗干扰能力强、结构简单、应用方便、价格低廉等特点[4],通信速率可达1 Mbps,使得CAN 总线在电动汽车应用上成为发展趋势。
图1 为一般电动车CAN 总线网络框图。CAN 总线接口电路的核心是使用8 位高性能的片内含CAN 控制器的P87C591 作为CAN 通信控制器,以完成CAN 的通信协议,而CAN 总线收发器的主要功能是增大通信距离,提高系统的瞬间抗干扰能力,保护总线,降低射频干扰(RFI)等。
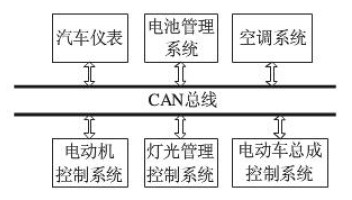
图1 一般电动车CAN 总线网络框图
本系统中共有16 组,每组有10 节电池串联,每1 个电池组配置1 个测量单元。每个单元采用一种设计非常简化的电池测量方法,由一个IC 集成了大部分电池参数的采集任务,结构简单,精度高,可靠性高。本设计采用电池管理芯片LTC6802,它通过一个1 MHz 串行接口进行通信,并包括温度传感器输入、12 位ADC 和一个精准的电压基准。每个LTC6802 能测量12 只单独电池,实现了0.12%(在室温条件下)和0.22%(在-40 ℃至+85 ℃的温度范围内)的准确度,能够承受60 V 的共模电压,完全适合在电池组高共模电压的要求。LTC6802 采用串行外部设备接口(SPI) 进行命令和数据通信, 本论文使用P87C591 的IO 模拟SPI 工作方式与LTC6802 进行数据通信,此方法可以更充分地使用硬件资源(见图2 所示)。
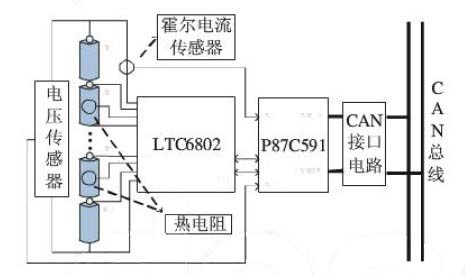
图2 基于CAN总线的电池组ECU采集系统的结构
每个测量单元的控制器均采用内部集成了CAN控制器SJA1000和A/D模数转换模块的单片机P87C591芯片,其主要功能是提供电池组的电压和温度信息,并将采集的信号通过CAN总线发送给电池管理ECU,其中CAN通讯接口电路如图3所示。
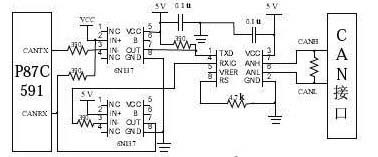
图3CAN通讯接口电路
电池组的ECU 与电池管理ECU 组成一个CAN 总线网络,网络拓扑结构为总线形,传输介质为双绞线,传输协议为CAN2.0B。电池管理ECU 为双CAN 控制器结构,一个CAN控制器与电池组ECU 组成电池管理系统内部的CAN 网络,另一个CAN 控制器与汽车中其他控制系统组成整车光纤CAN 总线网络,能实现多机通信,并达到上位机控制和电池组状态信息的采集。
2 系统软件设计
本系统采用8051 系列的C 语言进行软件编程,按照模块化设计思想进行编写,包括主程序、CAN 初始化程序、CAN发送数据程序、CAN 接收数据程序、A /D 转换及定时中断程序等。CAN初始化程序用来实现CAN 工作时的参数设置,主要包括工作方式的设置、时钟输出寄存器的设置、接受屏蔽寄存器和接收代码寄存器的设置、总线定时器的设置、输出控制寄存器的设置、中断允许寄存器的设置和总线波特率的设置。系统主程序流程设计如图4 所示,主要包括初始化和主循环部分。
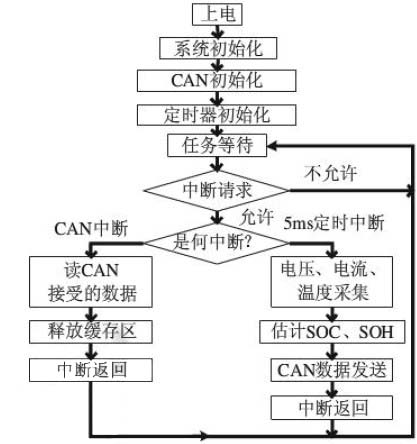
图4 系统主程序流程图


-
燃料电池电动汽车的缺点2023-11-30
-
常州纯电动汽车:重大利好 高速电动出行2023-11-30
-
一文看懂电动汽车是否能全部取代燃油车?2023-11-30
-
插电混动和纯电动汽车孰好孰坏2023-11-30
-
补贴下坡 限行助推电动汽车销量2023-11-30
-
电动汽车增程 甩掉里程忧虑2023-11-30
-
混合动力电动汽车工作原理2023-11-30
-
“十三五”电动汽车展望 电池决定发展重点2023-11-30
-
【干货】电动汽车三大安全问题浅析:电池/高压/辐射(图)2016-06-16
-
浅析:为何大部分电动汽车跑不快?2016-06-16
-
上海迪斯尼8月份就有电动汽车快充站啦2016-06-16
-
上海迪斯尼8月份就有电动汽车快充站啦 可同时给64辆车充电2016-06-16
-
6月15日起 国网北京上调电动汽车充电费2016-06-15
-
奔驰发布新电动汽车平台2016-06-15
-
第三届环湖电动汽车挑战赛赛段981.4公里2016-06-15