
五部门关于开展2024年新能源汽车下乡活动的通知
单片机的电动助力转向系统驱动电路设计
来源:新能源汽车网
时间:2018-06-21 16:01:49
热度:
单片机的电动助力转向系统驱动电路设计 1 EPS系统基本结构及工作原理 电动助力转向系统(EPS,EleCTRIC Power Steering)是未来转向系统的发展方
1 EPS系统基本结构及工作原理
电动助力转向系统(EPS,EleCTRIC Power Steering)是未来转向系统的发展方向。该系统由电动机直接提供转向助力,具有调整简单、装置灵活以及无论在何种工况下都能提供转向助力的特点。EPS最为突出的是该系统可在不更换系统硬件的情况下,通过改变控制器软件的设计,十分方便地调节系统的助力特性,使汽车能在不同车速下获得不同的助力特性,以满足不同工况下驾驶员对路感的要求。
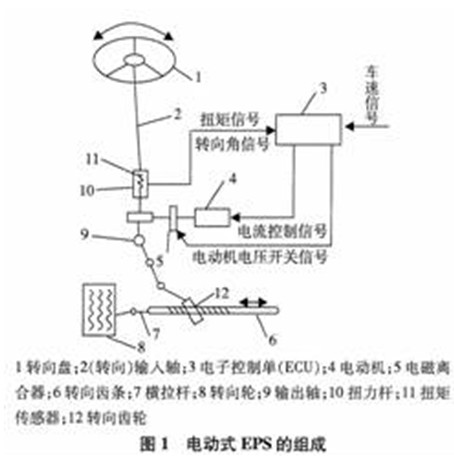
电动助力转向系统(EPS)主要包括传感器、控制器和执行器三大部件。传感器将采集到的信号经过相应处理后输人到控制器,控制器运行内部控制算法,向执行器发出指令,控制执行器的动作,系统结构如图1所示。其工作原理为:在操纵方向盘时,转矩传感器根据输人转向力矩的大小,产生出相应的电压信号,由此电动式动力系统就可以检测出操纵力的大小,同时,根据车速传感器产生的脉冲信号又可测出车速,再控制电动机的电流,形成适当的转向助力。
2 EPS控制系统硬件电路设计
2.1 微控制器的选择
MOTOROLA公司的MC9S12系列单片机是基于16位HCS12 CPU及0.5μm制造工艺的高速、高性能5.0V FLASH微控制器,是根据当前汽车的要求设计出来的一个系列。它使用了锁相环技术或内部倍频技术,使内部总线速度大大高于时钟产生器的频率,在同样速度下所使用的时钟频率较同类单片机低很多,因而高频噪声低,抗干扰能力强,更适合于汽车内部恶劣的环境。设计方案采用MC9S12DP256单片机,其主频高达25 MHz,同时片上还集成了许多标准模块,包括2个异步串行通信口SCI,3个同步串行通信口SPI,8通道输人捕捉/输出比较定时器、2个10位8通道A/D转换模块、1个8通道脉宽调制模块、49个独立数字I/0口(其中20个具有外部中断及唤醒功能)、兼容CAN2.OA/B协议的5个CAN模块以及一个内部IC总线模块;片内拥有256 KB的Flash EEPROM,12KB的RAM及4KB的EEPROM,资源十分丰富。
2.2 硬件电路总体框架
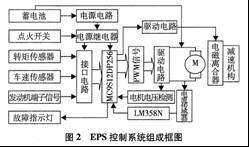
电动助力转向系统的硬件电路主要包括以下模块:MC9S12DP256微控制器、电源电路、信号处理电路、直流电机功率驱动模块、故障诊断模块与显示模块、车速传感器、扭矩传感器、发动机点火信号、电流及电流传感器等接人处理电路,另外还有电磁离合器等,EPS系统的硬件逻辑框架如图2所示。
2.3 电机控制电路设计
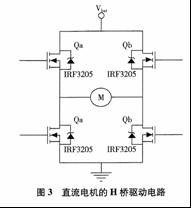
直流电动机是EPS系统的执行元件,电机的控制电路在系统设计中有着特殊的地位。在本系统中采用脉宽调制(PWM)控制H桥电路实施对直流电动机的控制,由4个功率MOSFET组成,如图3所示。采用PWM伺服控制方式,MOSFET功率管的驱动电路简单,工作频率高,可工作在上百千赫的开关状态下。系统采用4个International Reetifier公司生产的IRF3205型MOSFET功率管组成H桥路的4个臂。IRF3205具有8 mΩ导通电阻、功耗小、耐压达55V、最大直流电流110A、满足EPS系统对MOSFET功率管低压(正常工作不超过15V)大电流(额定电流30 A)的要求。
2.3.1 H桥上侧桥臂MOSFET功率管驱动电路设计
上侧桥臂的MOSFET功率管驱动电路如图4所示,其中Qa/Qb为上侧桥臂的功率MOSFET a管或b管,vdble为倍压电源电路提供的电源电压。当MOSFET的控制信号a(b)为高电平时,Q1和Q2导通,电源通过Q2,D1以及R5与C1的并联电路向Qa充电,直至Qa完全导通,Q3截止。当Qa导通时,忽略Qa的漏极和源极之间的电压降,则Qa的源极电压等于蓄电池电源电压。此时,Qa的栅-源极电压降VGS=( Vdble-VCE-VF-Vbat),其中VCE为2N2907的集一射极饱和导通电压,其典型值为0.4V,VF为D1的正向导通压降,其典型值为0.34V,Vbat为蓄电池电压。为保证器件可靠导通,降低器件的直流导通损耗,VGS不低于l0V。因此需设计高效的倍压电源电路,以保证Vdble的值足够大,满足功率MOSFET的驱动要求。如果蓄电池电压为12V时,Vdble≥12V+0.34V+0.4V+10V=22.74V。
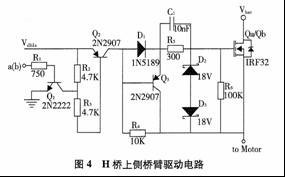
当MOSFET的控制信号a(b)管为低电平时,Q1和Q2均截止,Q3导通,Qa的栅-源极电压通过R5与C1的并联电路及Q3迅速释放,直至Qa关断。Qa关断时,连接其栅-源之间的电阻R6使其栅-源电压为零。IRF3205的导通门限电压为2~4V,OV的栅-源极电压能够使其关断。
2.3.2 下侧桥臂的功率MOSFET管驱动电路
下侧桥臂的功率MOSFET驱动电路如图5所示,其中Qc/Qd为下侧桥臂的功率MOSFET的c管或d管。当MOSFET的控制信号c(d)为高电平时,Q1导通,Q2截止,Q1的栅极电压通过R3与C1组成的并联电路、D1及Q1迅速释放,Qc/Qd关断。
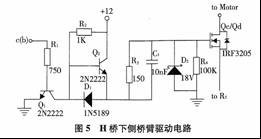
当MOSFET的控制信号c(d)低电平时, Q1截止,Q2导通,电源通过Q2以及R3与C,组成的并联电路对Qc的栅极充电,直至Qc完全导通。当Qc导通时,其栅-源极电压等于电源电压减去Q2的集-射极饱和导通电压,而电源电压又等于蓄电池电压减去1N5819二极管的正向导通电压。所以,Qc的栅-源极电压VGS=(Vbat-VCE-VF),当蓄电池电压为12V,取各参数为典型值得Qc的栅-源极电压为11.26V,满足IRF3205的栅极驱动(10V)所需的电压
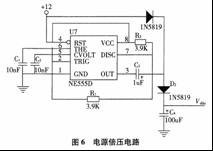
2.4 蓄电池倍压工作电源
由于上侧桥臂的MOSFET功率管的栅-源电压必需大于22.74V,而蓄电池电压只有12V。因此需要设计蓄电池倍压电源,产生二倍于蓄电池电压的电源电压,提供给H桥a、b功率管的驱动电路,保证高侧MOSFET功率管能够完全导通。
电源倍压电路如图6所示,NE555定时器工作于多谐振荡器模式,于引脚3产生幅值等于NE555的供电电压,频率为1/0.7(R2+2R1)C1的矩形波。C3、C4,Dl和D2构成电荷泵电路。当NE555引脚3输出高电平时,由于电容电压不能突变,C3正极电压为24V或接近24V,并通过D2向C4充电,使C4电压为24V或接近24V。由于受电路的工作效率、二极管D1和D2上的正向电压降以及负载能力的限制,使得系统输出电压低于供电电压的2倍。
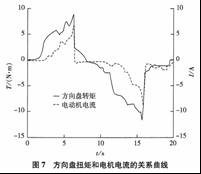
3 电机驱动电路台架试验
根据电动转向控制系统对稳定性和跟踪性的需要,采用最优H二控制器编制电动转向系统控制程序,并在汽车电动转向试验台上进行台架模拟试验,车速信号用模拟车速传感器发出的脉冲信号代替网。图7为中等车速转向助力时,测量的方向盘转矩(T)和助力电动机电流(I)变化曲线。从图7中可以看出,在转向过程中,助力电动机电流随着方向盘转矩的变化而变化,电动机电流的变化趋势和方向盘转矩的变化趋势相吻合,表明电动机的助力转矩对方向盘转矩有良好的跟踪性能。转向操作时,无助力滞后感,转向平稳,表明转向系统具有良好的跟踪性能和操纵稳定性。
4 结语
MC9S12系列16位单片机片内资源丰富,对于一般的简单应用,只需一片单片机加少量围电路即可。开发的直流电机电路经初步试验,性能良好,可基本满足电动助力系统转向系统的需要。文中只介绍电动助力转向系统硬件电路设计的基本框架,为获取良好的控制效果,电动助力转向系统将不仅仅局限于依据车速和扭矩这2个基本的信号进行电动助力转向系统的研制,转向角、转向速度、横向加速度及前轴重力等多种信号在未来的电动助力转向系统中可能都是要考虑的因素。


-
常州纯电动汽车:重大利好 高速电动出行2023-11-30
-
插电混动和纯电动汽车孰好孰坏2023-11-30
-
今年将引进换购纯电动汽车1230台2023-11-30
-
2018年纯电动汽车强势来袭 你准备好了么2023-11-30
-
新能源纯电动汽车直流充电设计介绍2018-06-21
-
宝马纯电动汽车 i3 电机与电控解析2018-06-21
-
最靠谱的纯电动汽车雨季使用指南2018-06-16
-
纯电动汽车准入门槛抬高 过剩产能将从源头治理2018-06-12
-
比亚迪客车助力上合组织青岛峰会,向世界展示中国方案2018-06-11
-
深圳:8月1日起,非纯电动汽车禁止注册网约车2018-06-11
-
SF MOTORS助力金康生产资质落地?NO,这只是打败特斯拉的一步棋2018-06-07
-
软银豪掷22.5亿美元 助力通用自动驾驶技术商业化2018-06-03
-
新能源汽车技术12-纯电动汽车关键技术2018-05-22
-
纯电动汽车发展将受制于成本增长2018-05-09
-
北京车展12款重磅纯电动汽车来袭!不得不看!2018-05-03